Hydroacoustique (du grec hydor- eau, acoustique- auditif) - la science des phénomènes se produisant dans le milieu aquatique et associés à la propagation, à l'émission et à la réception des ondes acoustiques. Il comprend les questions de développement et de création de dispositifs hydroacoustiques destinés à être utilisés en milieu aquatique.
Histoire du développement

Bases de l'hydroacoustique
Caractéristiques de la propagation des ondes acoustiques dans l'eau

Composants d'un événement d'écho.
Des recherches approfondies et fondamentales sur la propagation des ondes acoustiques dans l'eau ont commencé pendant la Seconde Guerre mondiale, dictées par la nécessité de résoudre les problèmes pratiques des marines et, en premier lieu, des sous-marins. Les travaux expérimentaux et théoriques se sont poursuivis dans les années d'après-guerre et résumés dans un certain nombre de monographies. Grâce à ces travaux, certaines caractéristiques de la propagation des ondes acoustiques dans l'eau ont été identifiées et clarifiées : l'absorption, l'atténuation, la réflexion et la réfraction.
L'absorption de l'énergie des ondes acoustiques dans l'eau de mer est provoquée par deux processus : le frottement interne du milieu et la dissociation des sels qui y sont dissous. Le premier processus convertit l'énergie d'une onde acoustique en chaleur, et le second, se transformant en énergie chimique, retire les molécules d'un état d'équilibre et les désintègre en ions. Ce type d’absorption augmente fortement avec l’augmentation de la fréquence des vibrations acoustiques. La présence de particules en suspension, de micro-organismes et d'anomalies de température dans l'eau entraîne également une atténuation de l'onde acoustique dans l'eau. En règle générale, ces pertes sont faibles et sont incluses dans l'absorption totale, mais parfois, comme par exemple dans le cas de la diffusion par le sillage d'un navire, ces pertes peuvent atteindre jusqu'à 90 %. La présence d'anomalies de température conduit au fait que l'onde acoustique tombe dans des zones d'ombre acoustique, où elle peut subir de multiples réflexions.
La présence d'interfaces eau - air et eau - fond entraîne la réflexion d'une onde acoustique par celles-ci, et si dans le premier cas l'onde acoustique est complètement réfléchie, alors dans le second cas le coefficient de réflexion dépend du matériau du fond : un fond boueux réfléchit mal, un fond sableux et rocheux réfléchit bien. . À faible profondeur, en raison des multiples réflexions de l'onde acoustique entre le fond et la surface, un canal sonore sous-marin apparaît, dans lequel l'onde acoustique peut se propager sur de longues distances. La modification de la vitesse du son à différentes profondeurs entraîne une courbure des « rayons » sonores - la réfraction.
Réfraction du son (courbure du trajet du faisceau sonore)
|
Réfraction du son dans l'eau : a - en été ; b - en hiver ; à gauche se trouve le changement de vitesse avec la profondeur. La vitesse de propagation du son change avec la profondeur, et les changements dépendent de la période de l'année et du jour, de la profondeur du réservoir et d'un certain nombre d'autres raisons. Les rayons sonores émergeant d'une source à un certain angle par rapport à l'horizon sont courbés, et la direction de courbure dépend de la répartition des vitesses du son dans le milieu : en été, lorsque les couches supérieures sont plus chaudes que les couches inférieures, les rayons se courbent vers le bas. et se reflètent principalement par le bas, perdant une part importante de leur énergie. en hiver, lorsque les couches d'eau inférieures maintiennent leur température, tandis que les couches supérieures se refroidissent, les rayons se courbent vers le haut et sont réfléchis à plusieurs reprises par la surface de l'eau, tandis que la perte d'énergie est nettement inférieure. Par conséquent, en hiver, la portée de propagation du son est plus grande qu’en été. La répartition verticale de la vitesse du son (VSD) et le gradient de vitesse ont une influence déterminante sur la propagation du son en milieu marin. La répartition de la vitesse du son dans différentes zones de l'océan mondial est différente et change avec le temps. Il existe plusieurs cas typiques de VRSD : |

Dispersion et absorption du son par inhomogénéités du milieu.
Propagation du son dans le son sous-marin. canal : a - changement de la vitesse du son avec la profondeur ; b - chemin des rayons dans le canal sonore. La propagation des sons à haute fréquence, lorsque les longueurs d'onde sont très petites, est influencée par de petites inhomogénéités que l'on retrouve habituellement dans les plans d'eau naturels : bulles de gaz, micro-organismes, etc. Ces inhomogénéités agissent de deux manières : elles absorbent et diffusent l'énergie du son. vagues. En conséquence, à mesure que la fréquence des vibrations sonores augmente, la portée de leur propagation diminue. Cet effet est particulièrement visible dans la couche superficielle de l’eau, où se trouvent le plus d’inhomogénéités. La dispersion du son par les inhomogénéités, ainsi que les surfaces inégales de l'eau et du fond, provoquent le phénomène de réverbération sous-marine, qui accompagne l'envoi d'une impulsion sonore : les ondes sonores, réfléchies par un ensemble d'inhomogénéités et fusionnant, donnent naissance à un prolongation de l'impulsion sonore, qui se poursuit après sa fin. Les limites de la portée de propagation des sons sous-marins sont également limitées par le bruit naturel de la mer, qui a une double origine : une partie du bruit provient des impacts des vagues sur la surface de l'eau, des vagues, des bruit de cailloux qui roulent, etc.; l'autre partie est associée à la faune marine (sons produits par les hydrobiontes : poissons et autres animaux marins). La biohydroacoustique traite de cet aspect très sérieux. |

Plage de propagation des ondes sonores
La plage de propagation des ondes sonores est une fonction complexe de la fréquence du rayonnement, qui est uniquement liée à la longueur d'onde du signal acoustique. Comme on le sait, les signaux acoustiques haute fréquence s'atténuent rapidement en raison de la forte absorption par le milieu aquatique. Les signaux basse fréquence, au contraire, sont capables de se propager sur de longues distances dans le milieu aquatique. Ainsi, un signal acoustique d'une fréquence de 50 Hz peut se propager dans l'océan sur des distances de plusieurs milliers de kilomètres, tandis qu'un signal d'une fréquence de 100 kHz, typique des sonars à balayage latéral, a une portée de propagation de seulement 1 à 2 km. . Les portées approximatives des sonars modernes avec différentes fréquences de signaux acoustiques (longueurs d'onde) sont indiquées dans le tableau :
Domaines d'utilisation.
L'hydroacoustique a reçu de nombreuses applications pratiques, car aucun système efficace de transmission d'ondes électromagnétiques sous l'eau sur une distance significative n'a encore été créé et le son est donc le seul moyen de communication possible sous l'eau. À ces fins, des fréquences sonores de 300 à 10 000 Hz et des ultrasons de 10 000 Hz et plus sont utilisés. Les émetteurs et hydrophones électrodynamiques et piézoélectriques sont utilisés comme émetteurs et récepteurs dans le domaine sonore, et les émetteurs piézoélectriques et magnétostrictifs dans le domaine ultrasonique.
Les applications les plus significatives de l'hydroacoustique :
- Résoudre les problèmes militaires ;
- Navigation maritime ;
- Communication sonore ;
- Exploration de la pêche ;
- Recherche océanologique;
- Domaines d'activité pour la valorisation des ressources des fonds marins ;
- Utiliser l'acoustique en piscine (à domicile ou dans un centre d'entraînement de nage synchronisée)
- Entraînement des animaux marins.
Remarques
Littérature et sources d'information
LITTÉRATURE:
- V.V. Shuleikin Physique de la mer. - Moscou : « Science », 1968. - 1090 p.
- I.A. roumain Bases de l'hydroacoustique. - Moscou : « Construction navale », 1979 - 105 p.
- Yu.A. Koriakine Systèmes hydroacoustiques. - Saint-Pétersbourg : « La science de Saint-Pétersbourg et la puissance maritime de la Russie », 2002. - 416 p.
Dans un avenir proche, les sous-marins et les avions anti-sous-marins de la marine russe devront recevoir un nouveau type de systèmes sonar. Selon des informations récentes, d'ici la fin de la décennie, le département militaire envisage d'acquérir un grand nombre d'équipements de surveillance sous-marine. De tels achats permettront d’équiper de nombreux sous-marins, avions, etc., d’équipements de détection modernes.
Fin mars, le ministère de la Défense a passé une nouvelle commande sur le site officiel des marchés publics concernant le développement ultérieur du matériel de la Marine. Selon les informations publiées sur l'appel d'offres, le ministère envisage d'acheter 55 systèmes sonars (GAS) de la famille MGK-335EM-03 "Mallard" dans diverses modifications. Le département militaire prévoit de dépenser pas plus de 194,6 millions de roubles pour l'achat de tous les produits requis, soit une moyenne de plus de 5,3 millions par complexe. Les premiers complexes dans le cadre de la future commande devraient être livrés cette année. La fin des livraisons est prévue pour 2019.
Schéma général du complexe MGK-335EM-05
Selon les données publiées, les forces armées envisagent d'acheter trois modifications des complexes Mallard, qui permettront de les équiper de sous-marins, d'avions anti-sous-marins et de systèmes fixes. 16 complexes Kryakva-A sont en cours d'acquisition pour les forces sous-marines. L'aviation navale devrait recevoir le même nombre de systèmes. 23 ensembles de la version « Kryakva-V » seront achetés pour les stations de reconnaissance hydroacoustique.
Les candidatures à l'appel d'offres sont acceptées jusqu'au 17 avril. Peu de temps après, un contrat sera signé pour la fourniture des produits requis, après quoi leur production commencera. Comme déjà mentionné, le département militaire souhaite recevoir cette année les premiers systèmes sonars des types requis.
Selon les données disponibles, le complexe hydroacoustique MGK-335EM-03 « Mallard » a été créé par la société Okeanpribor (Saint-Pétersbourg). Ce complexe est conçu pour être installé sur des navires de petit et moyen déplacement. Il est possible d'installer tous les équipements nécessaires aussi bien lors de la construction des navires que lors des réparations et de la modernisation. Dans ce dernier cas, le système Kryakva remplace l'ancien complexe MGK-355MS. Selon les données disponibles, de nouvelles modifications ont été créées sur la base du complexe naval, destiné à être exploité sur d'autres transporteurs. En conséquence, la famille Mallard de SJSC peut également être utilisée par les sous-marins, les avions et les systèmes de reconnaissance stationnaires.
Quel que soit le transporteur, les complexes ont des tâches similaires et sont unifiés au maximum. Leur tâche principale est de rechercher des sous-marins. La détection des cibles s'effectue en mode actif par écholocation ou en mode passif - dans ce cas, le bruit des cibles est surveillé. De plus, il est possible de détecter des signaux provenant d'autres complexes fonctionnant en mode actif. En outre, l’automatisation du « Mallard » est capable de suivre de manière indépendante une cible trouvée et de fournir des données de désignation de cible au dispositif de contrôle de tir de défense anti-sous-marine du porte-avions. Il est possible de classer automatiquement un objet détecté. Les complexes MGK-335EM-03 « Mallard » ont une fonction de communication hydroacoustique à basses et hautes fréquences. L'utilisation de codes de communication et d'identification est également prévue.

Architecture du GAK MGK-335EM-03
Afin d'améliorer les caractéristiques opérationnelles, les complexes présentent un certain nombre de caractéristiques et de fonctions importantes. Lorsque le complexe hydroacoustique est en fonctionnement, le niveau d'interférence acoustique est automatiquement surveillé. L'automatisation est également capable de prédire la portée attendue du système en fonction des conditions actuelles. Il existe des moyens automatisés pour surveiller le fonctionnement de tous les composants du complexe et surveiller leur état. L'automatisation surveille indépendamment le fonctionnement des unités et effectue des diagnostics. Si des problèmes sont détectés, ils sont localisés automatiquement. Il existe une fonction de formation des opérateurs, au cours de laquelle des cibles simulées sont utilisées.
Dans sa configuration de base, destinée à être installée sur des navires de surface, le SJSC MGK-335EM-03 « Mallard » comprend plusieurs appareils de base qui résolvent divers problèmes. Le principal et unique moyen d'observation et de détection de cibles dans ce cas est l'antenne active-passive sous la quille. Il se présente sous la forme d'un corps cylindrique équipé d'un grand nombre d'éléments sensibles. Pour maintenir la position requise de l'antenne pendant le fonctionnement, un système de suspension spécial avec dispositifs de stabilisation est utilisé. L'antenne a une hauteur de 1 m et un diamètre de 1 m. Autour de la circonférence du cylindre se trouvent 36 piliers avec 12 éléments chacun.
En outre, un dispositif générateur, un dispositif de réception-amplification et d'adaptation, ainsi que des dispositifs de surveillance et de contrôle de traitement et de stabilisation du signal numérique doivent être installés à bord du navire transporteur. Tous ces éléments du complexe sont interconnectés. L’électricité est fournie à tous les composants du complexe à l’aide d’un dispositif d’alimentation séparé connecté aux systèmes électriques généraux du navire.
Il est proposé d’installer une télécommande avec toutes les commandes nécessaires sur le lieu de travail de l’opérateur du complexe. Les données sur la situation sous-marine, les cibles détectées et le fonctionnement des dispositifs hydroacoustiques sont affichées sur deux moniteurs couleur. Les commandes principales sont le clavier et le trackball situés sur la console avant. Certains boutons et interrupteurs sont placés à côté des moniteurs. Le développeur du système « Mallard » propose également l'utilisation d'un indicateur à distance. Un moniteur supplémentaire peut être installé à une certaine distance de la console principale, affichant des informations sur la situation actuelle.

Antenne sous l'aile "Mallard"
Selon les données disponibles, la famille «Mallard» comprend des systèmes hydroacoustiques de plusieurs modèles, différant les uns des autres par la composition d'équipements spéciaux, principalement des antennes et autres moyens de détection. Ainsi, dans le projet MGK-335EM-01, l'antenne sous quille est complétée par une antenne étendue flexible remorquée. Le complexe MGK-335EM-02 comprend une antenne étendue remorquée, rayonnante et flexible. Le produit MGK-335EM-04 se distingue par une gamme de fréquences étendue lorsqu'il fonctionne en mode actif, ce qui permet de détecter les torpilles, et la version « Mallard » du MGK-335EM-05 dispose d'antennes de réception et d'émission abaissées.
Selon les données officielles du groupe Okeanpribor, le SJSC MGK-335EM-03 « Mallard » est capable de détecter un sous-marin d'un rayon équivalent de Re = 10 m à des distances allant jusqu'à 10-12 km. Les coordonnées de la cible sont déterminées avec une précision de 30' en relèvement. La précision de la portée atteint 1% de l'échelle de distance. En mode radiogoniométrie du bruit, le complexe est capable de détecter des sons d'une fréquence de 1,5 à 7 kHz. Après avoir détecté une cible et l’avoir suivie, la précision de la détermination du relèvement est de 30’. Le mode de détection des signaux hydroacoustiques, qui implique la détection de sonars étrangers fonctionnant en mode actif, permet de contrôler la gamme de fréquences de 1,5 à 7 kHz. L'orientation vers la source du signal détecté est déterminée avec une précision de 10°.
En analysant la nature des signaux réfléchis ou interceptés reçus, le complexe MGK-335EM-03 est capable de déterminer si un objet détecté appartient à une classe d'équipement particulière. Avec l’aide de l’opérateur, le système sonar est capable de distinguer un sous-marin d’une torpille. Dans le même temps, il est possible de désigner simultanément des cibles pour les systèmes d'armes anti-sous-marines.
Le complexe Mallard se distingue par des caractéristiques de communication hydroacoustique assez élevées et possède également des capacités particulières. Les communications basse fréquence ou haute fréquence sont effectuées à des distances allant jusqu'à 20 km. La communication par code, l'identification d'un objet détecté ou la modification de la distance par rapport à celui-ci peuvent être effectuées à des distances allant jusqu'à 30 km. Grâce au SAC MGK-335EM-03, l'équipage du navire porteur peut maintenir des communications téléphoniques avec les sous-marins et les navires russes en utilisant la gamme de fréquences de l'OTAN.

Panneau de contrôle complexe
Selon les dernières données, en 2017-19, la marine devra recevoir 55 ensembles de SAC de la famille MGK-335EM-03 « Mallard » dans différentes configurations, destinés à être installés sur des transporteurs de différentes classes. La plupart de ces équipements devraient être installés dans des stations de reconnaissance hydroacoustique, tandis que d'autres complexes seront utilisés par des sous-marins et des avions. Pour des raisons évidentes, aucune information précise sur les futurs transporteurs des complexes commandés n’est actuellement disponible. Pour l'instant, il ne reste plus qu'à faire des prévisions et essayer de prédire quels équipements seront équipés de tels équipements.
Dans le cas de l'aviation anti-sous-marine, les avions Il-38 et Tu-142 des dernières modifications peuvent être considérés comme des porteurs possibles du nouveau type de complexes. Aujourd'hui, cet équipement est en cours de réparation et de modernisation, au cours desquelles il reçoit divers nouveaux équipements. Le dernier projet de renouvellement des équipements pourra également utiliser les derniers systèmes hydroacoustiques.
16 complexes seront achetés en configuration sous-marine. Il est probable que cet équipement sera utilisé dans la réparation future de navires existants de conception relativement ancienne. Compte tenu de l’âge et de l’équipement des sous-marins en service, on peut supposer que tous les sous-marins nucléaires et diesel-électriques nationaux de tous les projets existants pourraient devenir des porteurs potentiels des systèmes « Mallard ». Tous les navires des forces sous-marines russes ne sont pas équipés de moyens modernes de surveillance de la situation sous-marine, raison pour laquelle ils ont besoin de nouveaux produits similaires. Au fur et à mesure des réparations, ils pourront recevoir de nouveaux appareils aux caractéristiques améliorées.
Il est curieux que les termes de l'appel d'offres actuel ne contiennent aucune clause sur l'achat de systèmes hydroacoustiques destinés à être installés sur des navires de surface. Le produit MGK-335EM-03 a été initialement développé spécifiquement en tant que dispositif de surveillance embarqué et n'a ensuite été développé qu'après, ce qui lui a permis d'être installé sur d'autres supports. Pour des raisons pas tout à fait claires, les plans immédiats du département militaire n'incluent pas l'achat du navire SJSC "Mallard".

Schéma du complexe naval MGK-335EM-05 avec une antenne abaissante supplémentaire
Comme le rapportent les médias nationaux, on sait déjà où iront les systèmes hydroacoustiques achetés. Le ministère de la Défense distribuera les produits résultants à plusieurs unités navales et aéronavales chargées de la défense anti-sous-marine. L'équipement sera envoyé à Kronstadt, Severomorsk et Novorossiysk, ainsi qu'à certaines bases du territoire de Primorsky. D'autres détails sur l'exploitation future de systèmes prometteurs n'ont pas encore été rapportés.
Il ressort des données disponibles que l'équipement des sous-marins, des avions et des systèmes hydroacoustiques fixes avec de nouveaux complexes de la famille MGK-335EM-03 « Mallard » aura des conséquences positives sur l'ensemble de la défense anti-sous-marine de la flotte dans son ensemble. Lors de la construction ou de la modernisation de sous-marins, d'avions, etc. recevront des équipements modernes pour suivre les objets sous-marins, ce qui affectera en conséquence l'efficacité de leur travail. En conséquence, la portée et la probabilité de détecter des objets potentiellement dangereux augmenteront sensiblement.
En plus des tâches principales associées à la détection et au suivi de divers objets, les nouveaux SAC peuvent être utilisés pour identifier les cibles trouvées, délivrer des désignations de cibles aux systèmes de contrôle, etc. Un mode formation est également prévu pour faciliter la formation des opérateurs sonar.
Selon les données officielles, à la mi-avril, le département militaire aura fini d'accepter les candidatures pour l'appel d'offres récemment lancé et commencera à sélectionner un fournisseur pour l'équipement requis. Un contrat de fourniture devrait bientôt apparaître, après quoi la production en série du SAC des modifications requises commencera. Les premiers échantillons de ces équipements devraient être reçus cette année, les derniers au plus tard fin 2019. Bien entendu, les livraisons de ces produits seront effectuées simultanément à la construction/modernisation de leurs supports. Cela signifie qu'au plus tard au début de la prochaine décennie, la défense anti-sous-marine nationale recevra de nouveaux équipements et, avec eux, de nouvelles capacités. Tout cela aura un impact positif sur le potentiel de la marine dans son ensemble.
Basé sur des matériaux provenant de sites :
http://zakupki.gov.ru/
http://i-mash.ru/
http://oceanpribor.ru/
http://armsdata.net/
http://flot.com/
CHAPITRE 1. ANALYSE DES MÉTHODES DE BASE POUR DÉTERMINER L'EMPLACEMENT DE LA SOURCE DES SIGNAUX DE NAVIGATION PAR DES SYSTÈMES ULTRA-COURTS.
1.1. Exposé de la problématique de développement d'un complexe de navigation hydroacoustique.
1.1.1. Expérience IPMT dans le développement de systèmes de navigation télémétriques.
1.1.2. Tâches de développement de GANS-UKB.
1.2. Méthodes d'amplitude pour déterminer des informations goniométriques à l'aide d'antennes de petite taille (base ultra-courte).
1.2.1. Antenne linéaire équidistante.
1.2.2. Antenne circulaire équidistante.
1.2.3. Précision potentielle des radiogoniomètres d'amplitude.
1.3. À propos de la mesure du déphasage entre deux signaux tonals déformés par le bruit.
1.4. Formules de calcul pour la radiogoniométrie de phase dans les systèmes avec des configurations d'antenne simples.
1.4.1. Récepteur à deux éléments.
1.4.2. Récepteur à quatre éléments.
1.4.3. Radiogoniomètre de phase à six canaux.
1.5. L'invention concerne un procédé de radiogoniométrie d'une source de signaux de navigation utilisant des antennes circulaires discrètes comportant un grand nombre d'éléments.
1.5.1. Dériver des formules de calcul et évaluer l'erreur d'un radiogoniomètre à base circulaire.
1.5.2. Algorithmes de radiogoniométrie pour un radiogoniomètre à base circulaire prenant en compte les changements d'orientation angulaire de l'antenne.
1.6. Conclusions.
CHAPITRE 2. TRAITEMENT DES INFORMATIONS STATISTIQUES DU SYSTÈME DE NAVIGATION HYDROACOUSTIQUE À BASE ULTRA-COURTE.
2.1. Solution du problème de radiogoniométrie basée sur des méthodes de traitement statistique.
2.2. Équations de radiogoniométrie pour antennes multi-éléments de diverses configurations.
2.2.1. Antenne multi-éléments linéaire.
2.2.2. Antenne avec un nombre arbitraire d'éléments sur une base circulaire.
2.2.3. Antenne à quatre éléments.
2.2.4. Antenne circulaire avec un élément supplémentaire au centre.
2.2.5. Antenne à double échelle.
2.2.6. Conclusions.
2.3. Caractéristiques du traitement du signal de navigation multifréquence.
2.4. Configuration de l'antenne et évaluation de la précision potentielle.
2.4.1. Antennes avec espacement demi-onde entre éléments.
2.4.2. Antennes clairsemées.
2.4.3. Sélection du secteur de visualisation basée sur le phasage de l'antenne.
2.5. Conclusions.
CHAPITRE 3. MÉTHODOLOGIE D'ÉVALUATION DE LA PRÉCISION DES SYSTÈMES DE NAVIGATION À BASE ULTRA-COURTE.
3.1. Estimation de la composante systématique de l’erreur de détermination du relèvement.
3.1.1. Fonction de phase d'une antenne de réception multi-éléments imparfaite.
3.1.2. Développement d'équipements de certification métrologique d'antennes de réception multi-éléments.
3.1.3. Etudes expérimentales de la précision des antennes en conditions de laboratoire.
3.2. Estimation de la précision d'un radiogoniomètre à large bande (étude des caractéristiques d'une antenne pour le traitement d'un signal de navigation multifréquence).
3.3. Etudes expérimentales des principales caractéristiques d'un système de navigation à ultra courte portée en mer peu profonde.
3.3.1. Méthodologie de certification du système par comparaison avec les données d'un système de navigation certifié (en utilisant l'exemple du GANS-DB).
3.3.2. Méthodologie d'évaluation de la précision des mesures angulaires à l'aide de données télémétriques.
3.3.3. L'invention concerne un procédé d'étalonnage d'un système de navigation à ligne de base ultra-courte dans des conditions naturelles à l'aide d'une balise à transpondeur de référence.
3.3.4. Justification métrologique pour l'étalonnage d'un système de navigation à base ultra-courte basé sur les données GANS DB et GPS.
3.4. Évaluation des caractéristiques métrologiques du GANS-UKB en conditions de haute mer.
3.5. Conclusions.
CHAPITRE 4. MÉTHODES DE CONSTRUCTION ET DE DÉVELOPPEMENT DES ÉLÉMENTS DE BASE DU SYSTÈME DE COMMUNICATION HYDROACOUSTIQUE D'UN VÉHICULE SOUS-MARIN. 146 4.1. Une approche générale pour estimer les principaux paramètres du GPS pour les AUV.
4.1.1. Informations générales.
4.1.2. À propos de la structure du symbole d'information.
4.1.3. À propos de la synchronisation.
4.1.4. Sur le choix de l'impulsion pour évaluer les caractéristiques d'un canal de communication.
4.1.5. Traitement d'un bloc de données.
4.1.6. Modélisation numérique d'un canal de communication. 153 4.2.0 développement de transducteurs et d'antennes piézoélectriques à large bande pour le GASS.
4.2.1. Transducteurs piézoélectriques cylindriques à large bande.
4.2.2. Transducteurs piézoélectriques cylindriques aux caractéristiques contrôlées
4.2.3. Transducteurs piézoélectriques à piston à large bande.
4.2.4. Sur l'adaptation électrique de transducteurs piézoélectriques dans une large bande de fréquences.
4.2.5. Sur l'efficacité énergétique des convertisseurs haut débit.
4.2.6. Caractéristiques des antennes développées.
4.3. Récepteur de signal GPS multi-éléments avec contrôle adaptatif du CV en fonction des données du radiogoniomètre du système de navigation.
4.3.1. Traitement de l'information.
4.3.2. Caractéristiques de l'antenne UKB lors de la réception des signaux du système de communication.
4.4. Etude expérimentale d'un système de communication multifréquence incohérent avec correction d'amplitude de la caractéristique de transfert du canal.
4.4.1. Algorithme de traitement du signal multifréquence.
4.4.2. Schéma fonctionnel du système de communication.
4.4.3. Etudes expérimentales des éléments du système de communication hydroacoustique en conditions de mer peu profonde.
4.5. Conclusions.
CHAPITRE 5. DÉVELOPPEMENT DU LOG DOPPLER COMME COMPOSITION DU SYSTÈME DE NAVIGATION EMBARQUÉ D'UN VÉHICULE SOUS-MARIN.
5.1. Antennes.
5.2. Traitement spectral de signaux impulsionnels courts.
5.3. Structure et circuits.
5.4. Etudes de terrain des caractéristiques du décalage dans l'AUV.
5.5. Conclusions.
CHAPITRE 6. MISE EN ŒUVRE TECHNIQUE ET EXPÉRIENCE D'APPLICATION PRATIQUE DES Aides À LA NAVIGATION HYDROACOUSTIQUE POUR ROBOT SOUS-MARIN. 207 6.1. Réalisation technique d'un système de navigation hydroacoustique à base ultra courte.
6.1.1. Schéma structurel du GANS-UKB.
6.1.2. Caractéristiques de la conception matérielle.
6.1.3. Antenne de réception du système de navigation.
6.1.4. Traitement de l'information.
6.1.5. Interface utilisateur.
6.1.6. Logiciel.
6.1.7. Tests grandeur nature et fonctionnement pratique du GANS-UKB.
6.2. Caractéristiques techniques de l'ensemble d'équipements GASS.
6.2.1. Caractéristiques principales.
6.2.2. Principe d'opération.
6.2.3. Schéma fonctionnel du récepteur.
6.2.4. Structure du signal GASS.
6.2.5. Résultats des essais en mer en haute mer.
6.3. Complexe de navigation hydroacoustique.
6.3.1. Composition et fonction du système de navigation du navire.
6.3.2. Propositions techniques pour le développement d'un système combiné de navigation et de contrôle.
6.4. Tests complets des aides à la navigation hydroacoustiques et expérience de leur utilisation dans des travaux réels.
6.4.1. Tests complets des aides à la navigation.
6.4.2. Expérience dans l'utilisation pratique des aides à la navigation hydroacoustiques lors d'opérations de recherche réelles.
Liste recommandée de mémoires
Développement de méthodes et d'algorithmes pour la navigation par balise unique de véhicules sous-marins autonomes inhabités 2013, candidat des sciences techniques Dubrovin, Fedor Sergeevich
Procédés de traitement des signaux hydroacoustiques reçus dans la zone de Fresnel des systèmes de réception et d'émission 2010, Docteur en Sciences Techniques Kolmogorov, Vladimir Stepanovich
Communications et navigation sous-marines utilisant des champs électromagnétiques 2006, Docteur en Sciences Techniques Shibkov, Anatoly Nikolaevich
Procédés et systèmes pour accroître la sécurité de la navigation basés sur des dispositifs de navigation hydroacoustiques dotés d'une base linéaire de récepteurs directionnels 2006, Docteur en Sciences Techniques Zavyalov, Viktor Valentinovich
Navigation dans un véhicule sous-marin autonome à l'aide d'un système de navigation inertielle sans cardan 2017, Candidate en sciences physiques et mathématiques Filatova, Guzel Amirovna
Thèses similaires dans la spécialité "Acoustique", 01/04/06 code VAK
Développement d'une méthode pour augmenter la précision de positionnement d'objets sous-marins 2013, candidat des sciences techniques Golov, Alexander Alexandrovich
Méthode paramétrique de transformation contrôlée des champs hydroacoustiques d'émission sonore des navires de recherche et de pêche, méthodes et systèmes pour leur mesure basés sur les lois de l'acoustique non linéaire 2002, candidat des sciences techniques Khaliulov, Fargat Amershanovich
Développement d'algorithmes de traitement de l'information dans des systèmes goniométriques multi-positions utilisant l'analyse spectrale rapide des signaux 2005, candidat en sciences techniques Davletkaliev, Roman Kuanyshevich
Procédés et moyens d'aide à la navigation pour aéronefs et contrôle du trafic aérien basés sur les technologies satellitaires 2004, Docteur en Sciences Techniques Slepchenko, Petr Mikhailovich
Théorie et méthodes de conception de systèmes d'antennes à bande ultra-large pour les équipements de radiogoniométrie fixes et mobiles 2011, Docteur en Sciences Techniques Rembovsky, Yuri Anatolyevich
Conclusion de la thèse sur le thème «Acoustique», Matvienko, Yuri Viktorovich
Principaux résultats des travaux :
1. Les principes de construction de systèmes à base ultra-courte ont été étudiés et une analyse des principales méthodes de détermination de la position angulaire de la source des signaux de navigation tonale et à large bande lors du traitement des informations provenant d'antennes de réception de petite taille a été réalisée.
Des expressions de calcul ont été obtenues et les caractéristiques radiogoniométriques des radiogoniomètres d'amplitude avec traitement des données récapitulatives et différentielles ont été étudiées.
La faible précision potentielle des systèmes de configuration la plus simple, contenant une, deux ou trois paires de récepteurs orthogonaux utilisant des méthodes de traitement de données de phase, est notée, ainsi que la nécessité de compliquer les systèmes pour augmenter la précision.
Une méthode de radiogoniométrie d'une source de signaux tonal est proposée et justifiée, basée sur l'utilisation d'antennes à grand nombre de récepteurs densément placés sur une base circulaire avec détermination de la phase cumulée dont l'erreur peut potentiellement être réduite à 0,1 degrés.
Des formules de calcul sont obtenues et, à l'aide de l'exemple d'antennes circulaires avec un grand nombre d'éléments, le lien entre les données des capteurs de cap, de roulis et de trim et leurs erreurs sur la valeur des paramètres de navigation mesurés et leurs erreurs est montré.
Sur la base de la méthode du maximum de vraisemblance, le problème du traitement statistique des données de navigation à l'aide d'antennes discrètes de configuration arbitraire est résolu. Dans ce cas, l'estimation des paramètres requis est déterminée par un traitement conjoint de toutes les paires de canaux pris avec des poids différents. Les coefficients de pondération contiennent à la fois une composante géométrique, égale à la dérivée de la fonction de phase par rapport au paramètre mesuré, et une composante énergétique, égale au rapport signal sur bruit en énergie dans le canal.
Les relations de calcul sont dérivées pour déterminer l'erreur de relèvement et de radiogoniométrie pour un certain nombre de configurations d'antenne les plus courantes : linéaire, circulaire, combinée.
Un radiogoniomètre de phase a été développé, basé sur l'utilisation d'antennes circulaires de grande taille d'onde avec un nombre limité d'éléments.
La technologie permettant de réduire le nombre de canaux de traitement tout en maintenant la résolution angulaire est étayée par la division de la procédure de radiogoniométrie en deux étapes : une radiogoniométrie grossière pour déterminer le secteur de visualisation et une solution exacte de l'équation de relèvement pour une approximation initiale donnée.
La possibilité de résoudre les ambiguïtés de phase apparaissant lors du fonctionnement d'antennes clairsemées à l'aide de méthodes de radiogoniométrie d'amplitude est justifiée.
Théoriquement, il est justifié d'atteindre une résolution angulaire de 0,1 à 0,2 degrés avec un nombre de canaux de 6 à 8 et une taille d'onde de l'antenne de 3 à 5 longueurs d'onde de fréquences de navigation.
Des relations ont été obtenues pour le calcul du gisement d'une antenne discrète de petite taille, dont le temps de propagation d'un signal acoustique à l'ouverture est comparable à la période de la fréquence moyenne du spectre reçu.
2. Des recherches ont été menées sur les méthodes d'évaluation de l'exactitude du GANS UKB et des méthodes de mesure de leurs caractéristiques en laboratoire et sur le terrain ont été développées.
Pour décrire une antenne multi-éléments discrète, une fonction vectorielle est proposée dont chaque composante décrit pour un élément d'antenne sélectionné la dépendance de la phase du signal acoustique reçu sur la direction de son arrivée. Une détermination (expérimentale) précise de la fonction est obligatoire pour résoudre le problème de radiogoniométrie d'un objet de navigation.
Un stand a été développé pour la certification des antennes multi-éléments, installé dans un bassin hydroacoustique spécialisé et comprend une source de signaux contrôlés et un système de réception avec une plate-forme rotative de précision et un équipement de mesure de phase multicanal pour des signaux tels que la radio. des impulsions.
Une technologie a été développée pour la certification des antennes, qui consiste à mesurer expérimentalement la fonction de phase de l'antenne, à déterminer des fonctions analytiques qui se rapprochent des données obtenues et à les utiliser pour résoudre des équations de radiogoniométrie, avec tabulation de la différence entre l'estimation du relèvement résultant et son valeur vraie (définie) sous la forme d'une estimation de la composante systématique de l'erreur.
Des antennes de réception multi-éléments ont été développées et étudiées pour des échantillons de systèmes existants, qui fournissent une erreur systématique d'environ 0,5 degré.
Une analyse comparative du fonctionnement du GANS DB et de l'UKB dans des conditions de mer peu profonde avec une installation fixe de l'antenne de réception UKB a été réalisée.
Une méthode d'estimation de mesures angulaires relatives basée sur le traitement de données télémétriques est analysée.
L'invention porte sur une méthode de certification du système UCB dans des mers peu profondes à l'aide d'une balise à transpondeur de référence basée sur le traitement des données télémétriques. Il est démontré qu'avec une erreur relative dans la mesure de la portée de plusieurs dixièmes de pour cent, l'erreur dans la valeur de relèvement calculée pour un AUV se déplaçant autour de l'antenne et de la balise UCB le long d'une trajectoire fermée ne dépasse pas un degré.
Une analyse a été effectuée et les caractéristiques de précision du système UCB ont été déterminées sur la base des résultats de travaux en haute mer. Les données de la base de données GANS, les données du système de navigation embarqué et du capteur de profondeur, ainsi que les données du télémètre ont été utilisées comme données de référence. La faisabilité de l'analyse de la variabilité différentielle des données télémétriques pour identifier des fragments individuels de la trajectoire de mouvement de l'AUV et la possibilité d'une moyenne raisonnable des données angulaires pendant le traitement de la trajectoire sont présentées. À la suite de l’analyse, il a été conclu que l’erreur de mesure angulaire était d’environ 0,5 degré.
Une méthode permettant d'éliminer les ambiguïtés de phase qui surviennent lorsque la taille de la base de mesure augmente par traitement statistique de signaux multifréquences est justifiée et testée expérimentalement.
Une antenne de réception multi-éléments et un équipement pour émettre (recevoir) des signaux complexes ont été développés et étudiés expérimentalement, et des estimations de l'erreur du système, qui s'élèvent à des dixièmes de degré, ont été réalisées.
3. Des méthodes ont été étudiées et des moyens d'un système à grande vitesse de transmission d'informations via un canal hydroacoustique de l'AUV au navire de support ont été développés.
Des recherches ont été menées sur les méthodes de construction de transducteurs piézoélectriques à large bande et des transducteurs cylindriques et à tige spécialisés avec des caractéristiques de directivité spéciales ont été développés, destinés à fonctionner dans les équipements des systèmes de communication : un transducteur cylindrique très efficace avec une bande passante allant jusqu'à trois octaves a été proposé. en utilisant de fines couches correspondantes d'une configuration en cornet, dont le CV répond aux exigences de fonctionnement en mer peu profonde ; il est proposé un convertisseur multi-résonant d'émission et de réception de signaux multi-fréquences, réalisé sous la forme d'un ensemble de piézocylindres coaxiaux ; Des transducteurs piézoélectriques à piston avec CV unilatéral ont été proposés pour fonctionner dans des conditions de canal de propagation de signal vertical.
La structure d'un système de transmission de données sur un canal de communication multifaisceau avec adaptation du schéma de traitement pour un bloc de données de longueur finie est analysée. La transmission d'un bloc d'informations est précédée d'une procédure de réglage des paramètres du récepteur ; la durée du bloc est déterminée par l'état actuel du canal de communication. À l'aide de méthodes de modélisation numérique, les caractéristiques du choix de signaux cohérents sont analysées et la faisabilité d'utiliser un signal avec modulation combinée de phase et de fréquence est démontrée.
L'invention concerne une technique permettant d'estimer la réponse impulsionnelle d'un canal de communication et de clarifier le moment de synchronisation en transmettant et en traitant une série d'impulsions de phase alternée.
Un schéma de réception de signaux d'un système de communication avec une antenne de navigation multi-éléments avec mise en œuvre d'un filtrage spatial d'un faisceau direct dans des conditions de propagation par trajets multiples est proposé et justifié sur la base des données sur la position angulaire de la source de signaux et des interférences obtenues. lors de l’exploitation du GANS UKB.
Des recherches ont été menées et sur la possibilité de transmettre des informations dans un canal de communication multifréquence avec égalisation préalable de la réponse en fréquence d'amplitude de bout en bout du canal et sélection du message en cours sur la base d'une analyse comparative de l'énergie dans chaque fréquence. canal a été justifié. Des études expérimentales d'un tel système de traitement dans des conditions de mer très peu profondes ont confirmé la possibilité d'utiliser un équipement permettant de transmettre des images graphiques à une vitesse d'environ 3 000 bit/s avec une faible probabilité d'erreurs.
4. Pour la navigation à bord du robot sous-marin, un journal Doppler a été développé et intégré au complexe.
Des recherches ont été menées et des antennes log spécialisées ont été développées avec une sensibilité élevée à l'écho, obtenue grâce à une adaptation acoustique-mécanique optimale des transducteurs piézoélectriques de l'antenne avec l'environnement de travail.
Pour augmenter la vitesse du décalage, une méthode de traitement spectral de signaux impulsionnels courts est proposée et mise en œuvre, offrant une résolution haute fréquence grâce à la formation de longues implémentations quasi-cohérentes de signaux réfléchis. La méthode vous permet de déterminer les composantes de vitesse avec une dispersion minimale en une seconde.
Un échantillon expérimental d'un journal Doppler a été développé et est utilisé dans le cadre d'un AUV
Une technique a été développée pour calibrer le loch dans des conditions naturelles en calculant la vitesse de l'AUV à l'aide des données de télémétrie du GANS.
5. Un complexe de navigation hydroacoustique a été développé, testé et testé en opérations réelles, permettant la formation d'une image d'informations de navigation de la progression de la mission à bord du navire de soutien et de l'AUV, comprenant des aides à la navigation hydroacoustiques, la transmission d'informations et la mesure de la vitesse absolue.
Développé, testé en mer peu profonde et profonde et intégré au complexe de navigation GANS UKB, qui comprend : une source synchronisée de signal de navigation sur site, un complexe de traitement de navire avec une antenne de réception sur câble, un récepteur GPS. Le système a les caractéristiques suivantes : portée - 6-10 km ; erreur de mesure du roulement - inférieure à 1 degré ; Erreur de mesure de plage - 0,5%. La possibilité que le système fonctionne en mode surveillance de l'emplacement d'un AUV effectuant un long voyage le long d'un objet étendu avec le mouvement d'un navire de support et remorquant une antenne de réception à une vitesse allant jusqu'à 5 nœuds a été confirmée expérimentalement.
Un système de navigation UKB haute fréquence dont la source est située à bord du navire et le récepteur sur l'appareil a été développé, testé et utilisé dans le cadre d'un appareil captif.
Un équipement de transmission d'informations pour le suivi opérationnel de l'état des opérations d'enquête et de recherche dans les conditions de la mer profonde et un canal de communication vertical ont été développés et testés dans le cadre de l'équipement de navigation hydroacoustique et de support d'information pour les AUV. L'équipement permet une transmission de données à une vitesse de 4 000 bps, avec un taux d'erreur d'environ un pour cent, ce qui garantit la transmission des images TV en 45 s.
Un journal Doppler a été développé, testé et intégré au système de navigation embarqué, permettant de mesurer le vecteur vitesse absolue de l'AUV dans la plage de vitesse de 0 à 2 m/s avec une erreur de 1 à 2 cm/s.
Une technologie d'utilisation du complexe de navigation a été proposée :
GANS DB - pour plusieurs lancements d'AUV dans des zones sélectionnées avec recherche par zone avec des exigences de précision accrues.
GANS UKB en cas de nécessité de longues transitions lors du suivi d'objets étendus ou de cibles mobiles, en cas de lancements d'urgence d'AUV, en cas de lancements secrets.<
DL avec calcul de trajectoires à l'estime - lorsque l'AUV atteint un point donné, lors d'un examen complémentaire à l'aide de systèmes TV.
Le fonctionnement réussi du complexe dans le cadre d'un AUV a été démontré lors de véritables opérations de recherche dans l'océan.
Remerciements
En conclusion, je voudrais exprimer ma profonde gratitude à tous les employés de l'IPMT qui ont participé au développement et aux tests des systèmes hydroacoustiques des véhicules sous-marins. Un merci spécial à l'académicien M.D. Ageev, aux chefs de département B.A. Kasatkin et N.I. Rylov.
CONCLUSION
Liste de références pour la recherche de thèse Docteur en sciences techniques Matvienko, Yuri Viktorovich, 2004
1. Ageev M.D. Véhicule autonome sans pilote modulaire de 1.TP. - Journal MTS, 1996, vol. 30, 1, p. 13-20.
2. Véhicules sous-marins autonomes et inhabités. Sous la rédaction générale. acad. Ageeva M, D. - Vladivostok, Dalnauka, 2000, 272 p.
4. R. Babb. Navigation AUV pour les études scientifiques sous-marines. Sea Technology, 1990, décembre, p.25-32.
6. J. Roméo, G. Lester. La navigation est la clé des missions AUV. Sea Technology, 2001, décembre, p.24-29.
7. Borodine V.I., Smirnov G.E., Tolstyakova N.A., Yakovlev G.V. Aides à la navigation hydroacoustiques. L., Construction navale, 1983, 262 p.
8. Milne P.H. Systèmes de positionnement hydroacoustique. L., Construction navale, 1989, 316 p.
9. Gestone J.A., Cyr R.J., Roesler G:, George E.S. Développements récents en navigation sous-marine acoustique. Journal de navigation, 1977, v.30, 2, p.246-280.
10. Boldyrev contre. Méthodes de précision. détermination des coordonnées lors de travaux hydrophysiques en pleine mer. Construction navale à l'étranger, 1980. N° 2. p.29-42.
11. Kislov A.F., Postnikov I.V. Caractéristiques de précision des systèmes de navigation par balise à longue base acoustique. Abstrait. Dokl. 2 Toute l'Union Conf. Recherche et développement de l'océan, L., 1978. numéro 2, pp. 95-96.
12. Kasatkin B.A., Kobaidze V.V. Caractéristiques de la navigation hydroacoustique dans la zone du plateau. Sur SAT. Véhicules sous-marins et leurs systèmes, Iz-vo DVNTs, Vladivostok, 1977, pp. 84-88.
13. Kasatkin B.A., Kobaidze V.V. Système de navigation télémétrique synchrone hydroacoustique. Brevet R.F. G01S 9/60, n° 713278, 1978.
14. Smirnov G.E., Tolstyakova N.A. Systèmes de navigation avec balises hydroacoustiques. Construction navale à l'étranger. 1980, n° 9, p. 45-54.
15. K. Vestgard, R. Hansen, V. Jalving et H. Pedersen. L'enquête HUGIN 3000 AUV -Conception et résultats sur le terrain.- /Intervention sous-marine 2001/.
16. T. Martin et G. Pilgrim. Défis d'enquête dans le positionnement USBL acoustique en eau profonde des véhicules sous-marins remorqués ou attachés. .- /Intervention sous-marine 2001/.
17. Hubert THOMAS, Éric PETIT. Des véhicules sous-marins autonomes (AUV) aux véhicules sous-marins supervisés (SUV). Océans-97.
18. Paramonov A.A., Klyuev M.S., Storozhev P.P. Quelques principes de construction de systèmes de navigation hydroacoustique à empattement long. VIIe Int. Scientifique et technique conf. "Méthodes et moyens modernes de recherche océanologique", Moscou, 2001, pp. 244-245.
19. Paramonov A.A., Afanasyev V.N. Système de navigation hydroacoustique GANS-M. VI Int. Scientifique et technique conf. "Méthodes et moyens modernes de recherche océanologique", Moscou, 2000, p. 100-112.
20. Ageev M.D., Blidberg D.R., Kiselev JI.B., Rylov N.I., Shcherbatyuk A.F. Etat de l’art et perspectives de développement de la robotique sous-marine. Technologies marines, Vladivostok, Dalnauka, 2001, numéro 4, pp. 6-23.
21. Ageev M.D., Kasatkin B.A., Kiselev L.V., Molokov Yu.G., Nikiforov V.V., Rylov N.I. Véhicules sous-marins automatiques. L., Construction navale, 1981, 248 p.
22. J. Manley. Véhicules sous-marins autonomes pour l'exploration des océans. Océans-2003, p.327-331.
23. Kobaidze V.V. Vitesse de propagation des signaux hydroacoustiques dans le problème de télémétrie. Prépublication, Vladivostok, TOI DVSC AN URSS, 1979, 37 p.
24. Kobaidze V.V. Etude de la précision de la télémétrie hydroacoustique. -Résumé de la thèse de doctorat. Vladivostok, TOI DVSC AN URSS, 1981, 26 p.
25. Xavier Lurton, Nicholas W. Millard. La faisabilité d'un système de positionnement acoustique de base à grande distance pour l'AUV. Actes d'Océan-94, Brest-France, 1994, vol.3, pp. 403-408.
26. Kasatkin B.A., Kosarev G.V. Particularité du développement de l'APS pour les AUV très longue portée. Actes d'Ocean-95, San-Diego, octobre 1995, v. Moi, p. 175-177.
27. Kasatkin B.A. Système de télémètre synchrone hydroacoustique longue portée. Brevet R.F. G01S 15/08, n° 2084923, 1995.
28. Positionnement acoustique. www. mors.fr.produit.
29. Capteur de navigation combiné de portée et de relèvement. Modèle NS-031. -www. sonatech.com.product
30. Kasatkin B.A. Système de navigation télémétrique synchrone hydroacoustique. Brevet R.F. G01S 15/08, n° 2084924, 1995.
31. D. Thomson, S. Elson. Systèmes de positionnement acoustique de nouvelle génération. Océans-2002, p.1312-1318.
32. Transpondeur générique programmable et transpondeur/répondeur Super Sub-Mini, types 7971/7977/7978,7970/7973 www.sonardyne.co.uk
33. B. Manson. Positionnement sur une zone étendue avec une précision lm. -International Ocean Systems, décembre 2001, p. 15-19.
34. Kasatkin B.A., Kosarev G.V. Fondements physiques de la télémétrie acoustique - Bulletin de la branche extrême-orientale de l'Académie des sciences de Russie R AND998, n° 3. p. 41-50.
35. Kobaidze V.V. Modèles d'erreur et algorithmes pour le traitement des informations télémétriques dans les systèmes de navigation hydroacoustique. Prépublication, Vladivostok, TOI FESC AN URSS, 1979, 42 p.
36. Kasatkin B.A. Caractéristiques invariantes du champ sonore dans un océan en couches. Dokl. Académie des sciences de l'URSS, 1986, 291, n° 6, p. 1483-1487.
37. M. Deffenbaugh, J.G. Bellingham, N. Schmidt. La relation entre le positionnement sphérique et hyperbolique. Actes d'Océan-96,
38. Kasatkin B.A., Kosarev G.V. Analyse de la précision de la mesure des coordonnées des balises transpondeurs d'un système de navigation hydroacoustique. Technologies marines, numéro 1. Vladivostok, Dalnauka, 1996, p.60-68.
39. Kasatkin B.A., Kosarev G.V. Utiliser la méthode de traversée pour déterminer les coordonnées absolues des balises à transpondeur. Technologies marines, numéro 2. Vladivostok, Dalnauka, 1998, p. 65-69.
40. J. Opderbecke. Étalonnage en mer d'un système de positionnement de véhicule sous-marin USBL. -Océans"2000.
41. Posidonia 6000. Système de positionnement acoustique sous-marin. www.ixsea-oceano.com
42.Newsletter. Kongsberg SIMRAD. Numéro n°2-2000. www.kongsberg-simrad.com.
43. K. Vestgard, R. Hansen, B. Jalving, O.A. Pedersen. L'AUV D'ENQUÊTE HUGIN 3000. RÉSULTATS DE CONCEPTION ET DE TERRAIN. Océans"2001.
44. Système de suivi à faible coût LXT. www.ore.com
45. Thomas C. Austin, Roger Stokey, C. von Alt, R. Arthur, R. Goldborough. RATS, un système de suivi acoustique relatif développé pour la navigation en haute mer - Océans"97.
46. Thomas C. Austin, Roger Stokey. Suivi acoustique relatif.- Sea Technology, 1998, mars, p.21-27.
47. M. Watson, C. Loggins et Y.T. Ochi. Un nouveau système de ligne de base super courte (SSBL) de haute précision. Technologie sous-marine, 1998, p.210-215, Tokyo, Japon.
48. James E. Deveau. Systèmes de positionnement acoustique sous-marin. OCÉANS-95, Vol.1, p. 167-174, San Diego, États-Unis.
49. NAUTRONIX. Positionnement précis ATS. www.nautronix.com
50. Yin Dongmei, Song Xinjian, Feng Haihong. La technologie clé pour mettre en œuvre un système de suivi et de positionnement d’objets sous-marins. -L'atelier international 3-D Harbin, Chine, 2002, p.65.
51. Yin Dongmei, Song Xinjian, Feng Haihong. Conception d'un système de positionnement acoustique sous-marin. L'atelier international 3-D Harbin, Chine, 2002, p.43.
52. Komlyakov B.A. Systèmes hydroacoustiques avec balises à transpondeur pour le suivi des systèmes sous-marins remorqués. - Construction navale, 1997, n° 6, pp. 39-45.
53. Paramonov A.A., Nosov A.V., Kuznetsov V.N., Dremuchev S.A., Klyuev M.S., i I
54. Storojev P.P. Sur l'augmentation de la précision du système de navigation hydroacoustique avec une base ultra-courte. VIIe Conf. Internationale. sur l'océanologie, M., 2001, pp. 80-81.
55. Bogorodsky A.V., Koryakin Yu.A., Ostroukhov A.A., Fomin Yu.P. Technologie hydroacoustique pour la recherche et le développement océaniques. VIIe Conf. Internationale. sur l'océanologie, M., 2001, pp. 266-269.
56. Zlobina N.V., Kamenev S.I., Kasatkin B.A. Analyse de l'erreur d'un système de navigation hydroacoustique à ligne de base ultra-courte. Sur SAT. Robots sous-marins et leurs systèmes. Numéro 5, 1992, Vladivostok, IPMT FEB RAS, pp. 116-123.
57. Kasatkin B.A., Kulinchenko S.I., Matvienko Yu.V., Nurgaliev R.F. Etude des caractéristiques d'un radiogoniomètre de phase pour UKB-GANS.- En collection. Robots sous-marins et leurs systèmes. Vsh.6, 1995, Vladivostok, Dalnauka, p.75-83.
58. Kasatkine B.A. Estimation de l'erreur d'un radiogoniomètre à base circulaire. Sur SAT. Technologies marines. Vol. 1,1996, Vladivostok, Dalnauka, p.69-73.
59. Kasatkin B.A., Matvienko Yu.V. Une méthode pour déterminer l'orientation d'une source de rayonnement et un dispositif pour sa mise en œuvre. Brevet RF n° 2158430, Bull. Image n°33, 2000
60. Matvienko Yu.V., Makarov V.N., Kulinchenko S.I. , Nurgaliev R.F., Rylov R.N. Système de navigation hydroacoustique à empattement ultra-court. Technologies marines, Vladivostok, Dalnauka, 2000, numéro 3, p. 102-113.
61. Matvienko Yu.V. Traitement de données dans un radiogoniomètre UKB basé sur une antenne multi-éléments imparfaite. VIIIe Int. Scientifique et technique conf. « Méthodes et moyens modernes de recherche océanologique » Moscou, 2003, partie 1, pp. 24-25.
62. John G. Proakis. Communications numériques. Maison d'édition de l'industrie électronique, Chine, Pékin, 2000, 928p.
63. M. Stojanovic. Progrès récents dans les communications acoustiques sous-marines à grande vitesse. IEEE Journal Oceanic Engineering, Vol.2 l, No.2, 1996, p. 125-136.
64. M. Stojanovic, J. Catipovic, J. Proakis. Communications numériques cohérentes en phase pour les canaux acoustiques sous-marins. IEEE Journal Ingénierie océanique, Vol. 19, non. 1, 1994, p.100-111.
65. Stojanovic M., J.A. Katipovic et J.G. Proacis. Traitement spatial et temporel à complexité réduite des signaux de communication acoustique sous-marins.- J. Acoust. Soc. Am., 98(2), Pt.l, août. 1995, p.961-972.
66. J. Labat. Communication sous-marine en temps réel. Océan-94, Brest, France, vol.3, p.501-506.
67. A.G. Bessios, F.M. Caïmi. Compensation multivoies pour la communication acoustique sous-marine. Océan-94, Brest, France, vol.1, p.317-322.
68. Lester R. LeBlanc. Traitement spatio-temporel des données de communication acoustique cohérentes en eaux peu profondes. IEEE J. Océan. Ing. Vol.25, n° 1, janvier 2000, p. 40-51.
69. Lester R. LeBlanc. Beamformer adaptatif pour la communication en eau peu profonde
70. B. Geller, V. Capellano, J.M. Brossier, A. Essebbar et G. Jourdain. Égaliseur pour la transmission de débit vidéo dans la communication sous-marine à trajets multiples. IEEE J. Océan. Ing. Vol.21, n° 2, avril 1996, p. 150-155.
71. Billon D., Quellec B. Performance des systèmes de communication sous-marine acoustique à hautes données utilisant la formation de faisceaux et l'égalisation adaptatives. Océan-94, Brest, France, vol.3, p.507-512.
72. R. Coates. Communication acoustique sous-marine. Technologie marine, 1994, non. 6, p. 41-47.
73. A. Zielinski, Young-Hoon Yoon, Lixue Wu. Analyse des performances des communications acoustiques numériques dans les canaux d'eau peu profonde. IEEE Journal Oceanic Engineering, Vol.20, No.4, 1995, p.293-299.
74. L. Wu et A. Zielinski. Rejet de trajets multiples utilisant une liaison acoustique à faisceau étroit. -Océans-88, Baltimore, p.287-290.
75. Wang C.H., Zhu Min, Pan Feng, Zhang X.J., Zhu W.Q. Modem de communication acoustique sous-marine MPSK.
76. ATM série 870. Modes de télémétrie acoustique. Manuel d'utilisation. - Datasonics, février 1999.
77. K. Scussel, J. Rice, S. Merriam. Un nouveau modem acoustique MFSK pour un fonctionnement dans les canaux sous-marins défavorables. Océans-97, Halifax.
78. J. Catipovic, M. Deffenbaugh, L. Freitag, D. Frye. Un système de télémétrie acoustique pour l'acquisition et le contrôle des données d'amarrage en haute mer. Océans-89, p. 887-892.
79. F. Caimi, D. Kocak, G. Ritter, M. Schalz. Comparaison et développement d'algorithmes de compression pour la télémétrie AUV. Avancées récentes.
80. P. I. Penin, E.A. Tsvelev. À propos de quelques approximations utilisées dans le calcul des canaux de communication hydroacoustiques. Collection acoustique d'Extrême-Orient, vol. 1, Vladivostok, 1975, p. 15-18.
81. P.I. Penin, E.A. Tsvelev, A.V. Shulgin. Calcul énergétique des canaux de communication hydroacoustiques. Collection acoustique d'Extrême-Orient, vol. 1, Vladivostok, 1975, p. 19-23.
82. Chvertkin E.I. Télémétrie hydroacoustique en océanologie.- L. 1978. 149 pp., Maison d'édition de l'Université de Leningrad.
83. V.P. Kodanev, S.P. Piskarev. Méthodologie d'optimisation des caractéristiques d'un système de transmission d'informations numériques sur un canal hydroacoustique dans des conditions de réception monofaisceau. Acoustic Journal, 1996, volume 42, n° 4, pages 573-576.
84. Yu.V. Zakharov, vice-président. Kodanev. Immunité au bruit de la réception adaptative de signaux acoustiques complexes en présence de réflexions sur les limites des océans. Acoustic Journal, 1996, volume 42, n° 2, pp.
85. Yu.V. Zakharov, vice-président. Kodanev. Réception adaptative de signaux dans un canal de communication hydroacoustique prenant en compte la diffusion Doppler Acoustic Journal, 1995, volume 41, n° 2, pp. 254-259.
86. Yu.V. Zakharov, vice-président. Kodanev. Etudes expérimentales d'un système de transmission d'informations acoustiques avec des signaux de type bruit. Acoustic Journal, 1994, volume 40, n° 5, pages 799-808.
87. Volkov A.V., Kuryanov B.F., Penkin M.M. Communications hydroacoustiques numériques pour applications océanographiques. VIIe Conf. Internationale. sur l'océanologie, M., 2001, pp. 182-189.
88. L.R. LeBlanc et R.R.J. Beaujean. Traitement spatio-temporel des données de communication acoustique cohérentes en eaux peu profondes. IEEE Journal Oceanic Engineering, Vol.25, No. 1, 2000, p.40-51.
89. M. Suzuki, K. Nemoto, T. Tsuchiya, T. Nakarishi. Télémétrie acoustique numérique des informations vidéo couleur. Océans-89, p.893-896.
90. R. Rowlands. F. Quinn. Limites de la vitesse de transmission des informations en télémétrie hydroacoustique - dans le livre. Acoustique sous-marine, Moscou, Mir, 1970, pp. 478-495.
91. Khrebtov A.A. Compteurs de vitesse des navires. JI., Construction navale, 1978, 286 p.
92. K.V. Jorgenson, B.L. Grose, F.A. Crandall. SONAR DOPPLER APPLIQUÉ À LA NAVIGATION SOUS-MARINE DE PRÉCISION. OCEAN-93, vol.2, p.469-474.
93. Kasatkin B.A., Zlobina N.B., Kasatkin S.B. Analyse des caractéristiques du transducteur piézoélectrique d'une antenne log Doppler phasée. Sur SAT. Technologies marines. Vol. 1,1996, Vladivostok, Dalnauka, p.74-83.
94. R. Pinkel, M. Merrefield et J. Smith. Développement récent de la technologie des sonars Doppler. . OCEAN-93, vol.1, p.282-286.
95. Navigateur RDI Workhorse DVL. www.rdinstruments.com.
96. Demidin B.M., Zolotarev V.B., Matvienko Yu.V., Plotsky V.D., Servetnikov M.I. Système de navigation hydroacoustique. Résumés 22 scientifiques et techniques. Conférence Dalnevost. Polytech. Inst. Vladivostok, 1974.
97. Demidin V.M., Matvienko Yu.V., Plotsky V.D., Servetnikov M.I. Système de navigation du véhicule sous-marin "SKAT". Résumés 1 All-Union. Conf. Sur la recherche et le développement des ressources de l'océan mondial. Vladivostok, 1976.
98. Dorokhin K. A. Présentation des données du système de navigation hydroacoustique. Sur SAT. Robots sous-marins et leurs systèmes. Numéro 5, 1992, Vladivostok, IPMT FEB RAS, p.94-100.
99. Dorokhin K. A. Matériel et logiciels pour l'unité du navire du système de navigation hydroacoustique. Sur SAT. Robots sous-marins et leurs systèmes. Numéro 5, 1992, Vladivostok, IPMT FEB RAS, p. 101-109.
100. Dorokhin K.A. Contrôleur du système de navigation hydroacoustique. Sur SAT. Robots sous-marins et leurs systèmes. 1990, Vladivostok, Branche IPMT d'Extrême-Orient de l'Académie des sciences de l'URSS, p. 102108.
101. Sosulin Yu.G. Fondements théoriques du radar et de la radionavigation. M., Radio et communication, 1992, p. 134.
102. Matvienko Yu.V. Sur la précision des radiogoniomètres d'amplitude. -Marine Technologies, Vladivostok, Dalnauka, 2003, numéro 5, pp. 56-62.
103. Smaryshev M.D., Dobrovolsky Yu.Yu. Antennes hydroacoustiques. Annuaire.-JI., Construction navale, 1984, p. 171.
104. Ya.D. Shirman, V.N. Manjos. Théorie et technologie du traitement des informations radar sur fond d'interférences. M., Radio et Communications, 1981, 416 p.
105. J. Bendat, A. Piersol. Analyse appliquée de données aléatoires. Moscou, Mir, 1989, 542 p.
106. Kenneth S. Miller, Marvin M. Rochwarger. Approche d'acovariance pour l'estimation du moment spectral. Transactions IEEE sur la théorie de l'information, septembre. 1972, p. 588-596.
107. Weiqing ZHU, Wen XU, Jianyun YU. Estimation des erreurs de l’estimateur de phase différentielle de corrélation de paires d’impulsions du réseau de sonar. Océans-96.
108. Zhu WeiQing, Wang ChangHong, Pan Feng, Zhu Min, Zhang XiangJun. Estimation spectrale dans ADSP. Océans-97.
109. Développement de dispositifs, d'instruments et de principes pour la construction de systèmes hydroacoustiques d'un véhicule sous-marin. -//Rapport sur la R&D « Mayak-IPMT »//, Scientifique. Main. Matvienko Yu.V. Vladivostok, Centre financier d'État NPO Dalstandart, 1992, 190 p.
110. Matvienko Yu.V., Rylov R.N., Rylov N.I. Développement d'une antenne de réception pour un sonar bathymétrique à phase latérale. VIIe Int. Scientifique et technique conf. « Méthodes et moyens modernes de recherche océanologique », Moscou, 2001, p.
111. Développement et création d'un véhicule sous-marin autonome et inhabité avec une portée et une autonomie accrues.//Scientifique. Main. L'académicien Ageev M.D., resp. Interprété par Matvienko Yu.V., Vladivostok, IPMT FEB RAS, 2001, n° d'enregistrement d'État. 01.960.010861.
112. Rapports spéciaux sur la R&D « K-1R » //Concepteur en chef, l'académicien Ageev M.D., chef adjoint. conception Matvienko Yu.V. Vladivostok, IPMT février RAS, 1998-2003.
113. G. Korn, T. Korn. Manuel de mathématiques.- Moscou, Nauka, 1970, 720 p.
114. Matvienko Yu.V. Traitement statistique des informations provenant d'un système de navigation hydroacoustique à base ultra-courte. Sur SAT. Technologies marines. Numéro 2, 1998, Vladivostok, Dalnauka, pp. 70-80.
115. Rylov N.I. Sur la détermination des paramètres de navigation dans le GANS UKB à partir des données d'une antenne multi-éléments. Sur SAT. Technologies marines, Vladivostok, Dalnauka, 2003, numéro 5, pp. 46-55.
116. A. Steele, S. Byrne, J. Riley, M. Swift. Comparaison des performances d'algorithmes d'estimation de roulements haute résolution à l'aide de données simulées et d'essais en mer. IEEE Journal Oceanic Engineering, Vol.l8, No.4, 1993, p.438-446.
117. P. Kraeuther, J. Bird. Traitement des tableaux de composants principaux pour la cartographie acoustique de bande. Océans-97.
118. Très grands circuits intégrés et traitement avancé du signal. Éd. S. Guna, X. Whitehouse. T. Kailata., Moscou, Radio et Communications, 1989, 472 p.
119. Marple Jr. C.J.I. Analyse spectrale numérique et ses applications. M. Mir., 1990, 584 p.
120. A. Steele, C. Byrne. Traitement de tableaux haute résolution utilisant des techniques de pondération de vecteurs propres implicites. IEEE Journal Ingénierie océanique, Vol. 15, non. 1, 1990, p.8-13.
121. R. Roy et T. Kailath. ESPRIT - Estimation des paramètres du signal via des techniques d'invariance rotationnelle. Transactions IEEE sur l'acoustique, la parole et le traitement du signal, Vol.37, No.7, 1989, p.984-994.
122. Gao Hogze, Xu Xinsheg. Recherche sur la méthode de détection de phase du système bathymétrique à andains multifaisceaux. IWAET-99, Harbin, Chine, 1999, p. 198-203.
123. Kinkulkin I.E., Rubtsov V.D., Fabrik M.A. Méthode de phase pour déterminer les coordonnées. M., 1979. 280s.
124. Matvienko Yu.V., Makarov V.N., Kulinchenko S.I., Rylov R.N., Radiogoniomètre des signaux de navigation à large bande. Sur SAT. Technologies marines, Vladivostok, Dalnauka, 2000, numéro 3, p. 114-120.
125. Matvienko Yu.V., Makarov V.N., Kulinchenko S.I., Nurgaliev R.F., Rylov R.N., Kasatkin B.A. Radiogoniomètre d'un système de navigation hydroacoustique à base ultra-courte. Brevet RF n° 2179730, Bull. Image n°5, 2002
126. B. Douglas et R. Pietsch. Techniques de formation de faisceaux optimales pour les réseaux imparfaitement calibrés. Actes d'Océan-96,
127. M.D. Ageev, A.A. Boreyko, Yu.V. Vaulin, B.E. Gornak, B.B. Zolotarev, Yu.V. Matvienko, A.F. Shcherbatyuk Véhicule sous-marin TSL amélioré pour les travaux sur le plateau et dans les tunnels. - Sur SAT. Technologies marines, Vladivostok, Dalnauka, 2000, numéro 3, pp. 23-38.
128. Matvienko Yu.V., Makarov V.N., Kulinchenko S.I. Sur le choix de la structure et des caractéristiques de l'équipement du canal de communication hydroacoustique d'un véhicule sous-marin. -Sur SAT. Technologies marines, Vladivostok, Dalnauka, 1996, numéro 1, pp. 84-94.
129. Matvienko Yu. V. Estimation des principaux paramètres d'un système de communication hydroacoustique pour un véhicule sous-marin. Sur SAT. Technologies marines. Numéro 4, 2001, Vladivostok, Dalnauka, pp. 53-64.
130. Recherche prévisionnelle sur la création d'une gamme unifiée de véhicules autonomes contrôlés dans le but d'augmenter l'efficacité des systèmes d'éclairage sous-marin, de navigation, de lutte anti-sous-marine et de guerre des mines
131. Marine. //Rapport sur les travaux de recherche « Centurion-FEB »//, Scientifique. Main. L'académicien Ageev M.D., resp. Interprète Matvienko Yu.V., Vladivostok, IPMT FEB RAS, 1996
132. Fondements théoriques du radar. Éd. V.E. Dulevich., Moscou, radio soviétique, 1978, 608 p.
133. Kasatkin B.A., Matvienko Yu.V. Sur l'évaluation de la capacité à large bande des transducteurs piézoélectriques cylindriques basse fréquence. Acoustic Journal, 1983, volume 29, n° 1, pp.
134. Balabaev S.M., Ivina N.F. Simulation informatique des oscillations et du rayonnement de corps de taille finie. Vladivostok, Dalnauka, 1996, 214 p.
135. Transducteurs piézocéramiques. Manuel éd. Pougatcheva S.I. -Leningrad, Construction navale, 1984, 256 p.
136. Matvienko Yu.V. Développement et recherche de méthodes de description et de construction de transducteurs piézoélectriques cylindriques à large bande. Résumé de thèse. doctorat DOI DVSC AS URSS, 1985, 22 p.
137. Matvienko Yu.V., Ermolenko Yu.G., Kirov I.B. Caractéristiques du développement d'antennes moyennes fréquences pour les systèmes hydroacoustiques d'un véhicule hauturier. Abstrait. Dokl. Conférence interuniversitaire , Maison d'édition TOVVMU, Vladivostok, 1992, pp. 78-83.
138. V.A. Kasatkin, Ju.G. Larionov, Matvienko Y.V. Développement d'un réseau en eau profonde pour profileur de fonds marins.- Actes d'Océans-94, Brest-France, 1994.
139. Kasatkin B.A., Matvienko Yu.V. Spectre de fréquences propres d'un transducteur piézoélectrique cylindrique. Acoustic Journal, 1979, volume 25, n° 6, pages 932-935.
140. Kasatkin B.A. , Ermolenko Yu.G., Matvienko Yu.V. Transducteur piézoélectrique multifonctionnel pour la recherche sous-marine. Assis. Robots sous-marins et leurs systèmes, IPMT FEB RAS, numéro 5, 1992, p. 133-140. "
141. Ermolenko Yu.G., Kasatkin B.A., Matvienko Yu.V. Émetteur hydroacoustique. Brevet de la Fédération de Russie n° 2002381, 1993.
142. Kasatkin B.A., Matvienko Yu.V. Transducteur électroacoustique. -. Auto. Svid. N° 1094159, Bull. image, n° 19, 1984.
143. Matvienko Yu.V., Sur l'influence de la structure du remplissage interne sur les caractéristiques des transducteurs piézoélectriques cylindriques. Dans le livre : Utilisation de méthodes physiques modernes dans la recherche et le contrôle non destructifs., Khabarovsk, 1981, partie 2, p. 125-126.
144. Kasatkin B.A., Matvienko Yu.V. Transducteur piézoélectrique cylindrique avec inversion du rayonnement interne Dans le livre : Utilisation de méthodes physiques modernes dans la recherche et les tests non destructifs., Khabarovsk, 1981, partie 2, pp. 131-132.
145. Kasatkin B.A., Matvienko Yu.V. Émetteur de mesure de la gamme de fréquences audio. Mesures acoustiques. Méthodes et moyens. IVe session de la Société Acoustique Russe, Moscou, 1995, p.4.
146. Kasatkin B.A., Matvienko Yu.V. Transducteur électroacoustique cylindrique. Auto. Svid. N° 1066665, Bull. image, n ° 2, 1984.
147. Kasatkin B.A., Matvienko Yu.V. Transducteur piézoélectrique cylindrique aux caractéristiques contrôlées. Acoustic Journal, 1982, volume 28, n° 5, pages 648-652.
148. Kasatkin B.A., Matvienko Yu.V. Dispositif d'émission sonore à large bande. Auto. Svid. N° 794834, 1982.
149. Analyse et développement d'antennes hydroacoustiques à large bande basées sur des transducteurs piézocéramiques. // Rapports sur les travaux de recherche « Penseur -1 »//, Scientifique. Main. Matvienko Yu.V., Vladivostok, Centre financier d'État NPO Dalstandart, 1983-1985.
150. Développement et test d'un chemin d'émission de signal de forme spéciale.
151. Rapports sur le volet des travaux de recherche « Evolute-strip » //, Scientifique. Main. Matvienko Yu.V., Vladivostok, Centre financier d'État NPO Dalstandart, 1988-1990.
152. Etude de la fonction de transfert d'un guide d'ondes acoustiques et d'antennes.
153. Rapports sur les travaux de recherche « Aquamarine »//, Scientifique. Main. Kasatkin B.A., resp. Interprété par Matvienko Yu.V., Vladivostok, Centre financier d'État NPO Dalstandart, 1989. .94 p., n° Enregistrement d'État. 01.890.073426
154. Kasatkin B.A., Matvienko Yu.V. Caractéristiques d'impulsion des transducteurs piézoélectriques cylindriques. Abstrait. Conf. Dokl All-Union. Océan mondial, Vladivostok, 1983, p. 16.
155. Rylov N.I. , Matvienko Yu.V., Rylov R.N. Antenne de réception du sonar bathymétrique à balayage latéral de phase. Brevet RF n° 2209530, 2003
156. R.A. Monzingo, T.W. Meunier. Réseaux d'antennes adaptatives. M., Radio et Communications, 1986, 446 p.
157. Matvienko Yu.V., Makarov V.N., Kulinchenko S.I. A propos d'une méthode de construction d'un récepteur GASS pour une mer très peu profonde. Recherche et développement de l'océan mondial, 6 Vseros. Acoustique. Conf., Vladivostok, 1998, p. 162-163.
158. Matvienko Y.V., Makarov V.N., Kulinchenko S.I. Système simple de communication hydroacoustique en mer peu profonde pour AUV. Construction navale et ingénierie océanique, problèmes et perspectives, Vladivostoc, 2001, p. 495-498.
159. Matvienko Yu.V., Makarov V.N., Kulinchenko S.I. Un système de communication hydroacoustique simple en mer peu profonde pour les AUV. Problèmes et méthodes de développement et d'exploitation des armes et équipements militaires de la Marine, numéro 32, Vladivostok, TOVMI, 2001. pp. 268-275.
160. K.V. Jorgenson, B.L. Grose, F.A. Crandall. H. Allegret. Une nouvelle génération de courantomètres à profilage acoustique. -Océans-94, vol.1, p.429-434.
161. C.-B. Burdick. Analyse des systèmes hydroacoustiques. JI., Construction navale, 1988, 358 p.
162. T. Lago, P. Eriksson et M. Asman. La méthode Symmiktos : une méthode d'estimation robuste et précise pour l'estimation du courant acoustique Doppler. Océans-93, vol.2, p.381-386.
163. T. Lago, P. Eriksson et M. Asman. Estimation spectrale à court terme des données du courantomètre Doppler acoustique. Océan-96.
164. H. Susaki. Un algorithme rapide pour une mesure de fréquence de haute précision. Application au Sonar Doppler Ultrasonique. Océans-2000, p. 116-121.
165. H. Susaki. Un algorithme rapide pour une mesure de fréquence de haute précision. Application au Sonar Doppler Ultrasonique. IEEE Journal Oceanic Engineering, Vol.27, No. 1, 2002, p.5-12.
166. Matvienko Yu.V., Kulinchenko S.I., Kuzmin A.B. Accumulation quasi cohérente de signaux d'impulsions courtes pour augmenter la vitesse de décalage Doppler. Sur SAT. Technologies marines, Vladivostok, Dalnauka, 1998, numéro 2, pp. 81-84.
167. Matvienko Yu.V., Makarov V.N., Kulinchenko S.I. ,Kuzmin A.V. Voie de réception du journal Doppler pulsé de haute précision Brevet de la Fédération de Russie n° 2120131, 1998.
168. Matvienko Yu.V., Kuzmin A.V. Enregistrement Doppler de petite taille pour AUV - Cinquième conférence scientifique et technique russe « État actuel et problèmes de navigation et d'océanographie » (NO-2004, Saint-Pétersbourg).
169. Matvienko Yu.V., Nurgaliev R.F., Rylov N.I. Système hydroacoustique pour suivre la localisation d'un véhicule sous-marin autonome (AUV) - Ocean Acoustics, Dokl. 9 école-sem. Académicien JI.M. Brekhovskikh Moscou, 2002, pp. 347-350.
170. Matvienko Yu.V., Makarov V.N., Nurgaliev R.F. Module de navigation et d'assistance à l'information AUV. Abstrait. rapport ,TOVVMU, Vladivostok, 1998.,
171. Zolotarev V.V., Kasatkin B.A., Kosarev G.V., Kulinchenko S.I., Matvienko Yu.V. Complexe hydroacoustique pour véhicule sous-marin autonome et inhabité en haute mer. Assis. Actes de la Xe session de l'Académie russe de l'éducation, Moscou, 2000. p.59-62.
172. Ageev M.D., Kasatkin B.A., Matvienko Yu.V., Rylov R.N., Rylov N.I. Aides à la navigation hydroacoustique pour un robot sous-marin. VIIIe Int. Scientifique et technique conf. « Méthodes et moyens modernes de recherche océanologique », Moscou, 2003, partie 2, pp. 40-41.
173. Ageev M.D., Vaulin Yu.V., Kiselev JI.B., Matvienko Yu.V., Rylov N.I., Shcherbatyuk A.F. Systèmes de navigation sous-marine pour AUV. -VIII Int. Scientifique et technique conf. « Méthodes et moyens modernes de recherche océanologique », Moscou, 2003, partie 2, p. 13-22.
Veuillez noter que les textes scientifiques présentés ci-dessus sont publiés à titre informatif uniquement et ont été obtenus grâce à la reconnaissance de textes de thèse originaux (OCR). Ils peuvent donc contenir des erreurs associées à des algorithmes de reconnaissance imparfaits. Il n’y a pas de telles erreurs dans les fichiers PDF des thèses et résumés que nous livrons.
Principes de construction de complexes et systèmes hydroacoustiques actifs Sujet : Questions : 1) Principes de construction d'un sonar actif 2) Principes de construction d'un sonar de communication et d'identification 3) Principes de construction d'un sonar de détection de mines Objectif pédagogique : 1. Étudier les principes de construction du sonar actif 2. Étudier les principes de fonctionnement selon les schémas structurels du GAS II actif. Objectif pédagogique 1. Activation de l'activité cognitive des cadets. 2. Formation de compétences de commandement et méthodologiques (CMS) et de compétences de travail pédagogique (EWS) chez les cadets. 1
 Littérature : 1. Normes d'État de l'URSS et de la Fédération de Russie. GOST 2. Système unifié de documentation de conception (ESKD) 3. Yu. A. Koryakin, S. A. Smirnov, G. V. Yakovlev. Technologie hydroacoustique embarquée : état des lieux et problématiques actuelles. – Saint-Pétersbourg. : Nauka, 2004. – 410 p. 177 malades. 4. I. V. Solovyov, G. N. Korolkov, A. A. Baranenko et autres. Électronique radio marine : Manuel. – Saint-Pétersbourg. : Politekhnika, 2003. – 246 p. : je vais. 5. G. I. Kazantsev, G. G. Kotov, V. B. Lokshin, etc. Manuel d'hydroacoustique. – M. : Militaire. publié 1993. 230 p. je vais. 2
Littérature : 1. Normes d'État de l'URSS et de la Fédération de Russie. GOST 2. Système unifié de documentation de conception (ESKD) 3. Yu. A. Koryakin, S. A. Smirnov, G. V. Yakovlev. Technologie hydroacoustique embarquée : état des lieux et problématiques actuelles. – Saint-Pétersbourg. : Nauka, 2004. – 410 p. 177 malades. 4. I. V. Solovyov, G. N. Korolkov, A. A. Baranenko et autres. Électronique radio marine : Manuel. – Saint-Pétersbourg. : Politekhnika, 2003. – 246 p. : je vais. 5. G. I. Kazantsev, G. G. Kotov, V. B. Lokshin, etc. Manuel d'hydroacoustique. – M. : Militaire. publié 1993. 230 p. je vais. 2
 Selon la méthode d'obtention des informations hydroacoustiques (selon le mode d'utilisation de l'énergie), les systèmes hydroacoustiques sont divisés en systèmes hydroacoustiques actifs a) Systèmes hydroacoustiques passifs Un système hydroacoustique actif (moyen) est un dispositif qui génère et émet des signaux hydroacoustiques dans le milieu aquatique. l'environnement et à ses interfaces, reçoit des signaux réfléchis ou émis par des objets sous-marins et de surface. Les termes équivalents pour un système hydroacoustique actif sont sonar actif, radiogoniométrie, localisation d'écho ou simplement sonar).
Selon la méthode d'obtention des informations hydroacoustiques (selon le mode d'utilisation de l'énergie), les systèmes hydroacoustiques sont divisés en systèmes hydroacoustiques actifs a) Systèmes hydroacoustiques passifs Un système hydroacoustique actif (moyen) est un dispositif qui génère et émet des signaux hydroacoustiques dans le milieu aquatique. l'environnement et à ses interfaces, reçoit des signaux réfléchis ou émis par des objets sous-marins et de surface. Les termes équivalents pour un système hydroacoustique actif sont sonar actif, radiogoniométrie, localisation d'écho ou simplement sonar).
 Le sonar actif est une méthode de détection et de détermination des propriétés d'objets sous-marins, basée sur l'émission de signaux hydroacoustiques dans le milieu aquatique, ainsi que sur la réception et le traitement de signaux d'écho résultant de la réflexion (ou de la diffusion) de ondes acoustiques provenant d'objets sous-marins. Les moyens (systèmes) hydroacoustiques qui fournissent un sonar actif sont appelés sonars, stations sonar (GLS) ou trajets sonar (GL), trajets de radiogoniométrie (ED) et trajets de mesure de distance (ID) pour le système sonar. Généralement, GLS fait référence à des systèmes conçus pour détecter et mesurer la distance par rapport aux sous-marins et autres objets sous-marins importants.
Le sonar actif est une méthode de détection et de détermination des propriétés d'objets sous-marins, basée sur l'émission de signaux hydroacoustiques dans le milieu aquatique, ainsi que sur la réception et le traitement de signaux d'écho résultant de la réflexion (ou de la diffusion) de ondes acoustiques provenant d'objets sous-marins. Les moyens (systèmes) hydroacoustiques qui fournissent un sonar actif sont appelés sonars, stations sonar (GLS) ou trajets sonar (GL), trajets de radiogoniométrie (ED) et trajets de mesure de distance (ID) pour le système sonar. Généralement, GLS fait référence à des systèmes conçus pour détecter et mesurer la distance par rapport aux sous-marins et autres objets sous-marins importants.

 Schéma reflétant le principe de détection et de détermination de la distance à une cible Réception d'un signal g/a réfléchi Émission d'un signal g/a D=st/2 Réflexion d'un signal g/a
Schéma reflétant le principe de détection et de détermination de la distance à une cible Réception d'un signal g/a réfléchi Émission d'un signal g/a D=st/2 Réflexion d'un signal g/a
 d Voie d'émission (Dispositif générateur) a e Impulsion de démarrage Systèmes d'affichage d'informations Systèmes de synchronisation Impulsion de démarrage b c Système d'alimentation a b c d e Dispositif pour former la caractéristique de directivité de l'antenne Voie de réception (Dispositif de réception) f Distance D = (s t)/2 Réception Émission Antenne acoustique
d Voie d'émission (Dispositif générateur) a e Impulsion de démarrage Systèmes d'affichage d'informations Systèmes de synchronisation Impulsion de démarrage b c Système d'alimentation a b c d e Dispositif pour former la caractéristique de directivité de l'antenne Voie de réception (Dispositif de réception) f Distance D = (s t)/2 Réception Émission Antenne acoustique

 Une antenne acoustique (AA) est conçue pour convertir l'énergie électrique en énergie acoustique et vice versa. Les dispositifs d'entrée sont utilisés pour pré-amplifier les signaux reçus, ainsi que pour connecter une antenne acoustique à des dispositifs de génération et de réception. Le dispositif générateur génère des impulsions de rayonnement avec des paramètres spécifiés. Les canaux de réception du chemin de détection résolvent les problèmes de détection d'objets sous-marins et de détermination approximative de leurs coordonnées. Les canaux de clarification des coordonnées sont conçus pour déterminer avec précision les coordonnées des objets sous-marins avec leur transmission ultérieure aux systèmes de contrôle d'armes.
Une antenne acoustique (AA) est conçue pour convertir l'énergie électrique en énergie acoustique et vice versa. Les dispositifs d'entrée sont utilisés pour pré-amplifier les signaux reçus, ainsi que pour connecter une antenne acoustique à des dispositifs de génération et de réception. Le dispositif générateur génère des impulsions de rayonnement avec des paramètres spécifiés. Les canaux de réception du chemin de détection résolvent les problèmes de détection d'objets sous-marins et de détermination approximative de leurs coordonnées. Les canaux de clarification des coordonnées sont conçus pour déterminer avec précision les coordonnées des objets sous-marins avec leur transmission ultérieure aux systèmes de contrôle d'armes.
 Les systèmes de suivi de cibles semi-automatiques permettent de suivre des cibles en mode semi-automatique avec enregistrement automatique des coordonnées actuelles. Le canal d'écoute permet d'écouter à l'oreille les signaux reçus pour classer le contact hydroacoustique avec une cible. Le système d'affichage est un périphérique de sortie et est nécessaire pour afficher visuellement les informations reçues et collecter des données sur la cible. Le système de contrôle et de synchronisation constitue le lien entre tous les appareils et systèmes du GLS.
Les systèmes de suivi de cibles semi-automatiques permettent de suivre des cibles en mode semi-automatique avec enregistrement automatique des coordonnées actuelles. Le canal d'écoute permet d'écouter à l'oreille les signaux reçus pour classer le contact hydroacoustique avec une cible. Le système d'affichage est un périphérique de sortie et est nécessaire pour afficher visuellement les informations reçues et collecter des données sur la cible. Le système de contrôle et de synchronisation constitue le lien entre tous les appareils et systèmes du GLS.
 Le dispositif de formation intégré (VUTU) est conçu pour développer les compétences des opérateurs pour une cible simulée, ainsi que la capacité de contrôler le radar dans différents modes. Le système de contrôle automatique intégré (BCAS) permet de surveiller les principaux paramètres techniques du GLS et d'identifier ses dysfonctionnements. Les GLS sont mis en service en fournissant une tension d'alimentation à tous les appareils ; à cet effet, la station dispose d'un tableau de distribution sur lequel se trouvent les commandes du système d'alimentation électrique.
Le dispositif de formation intégré (VUTU) est conçu pour développer les compétences des opérateurs pour une cible simulée, ainsi que la capacité de contrôler le radar dans différents modes. Le système de contrôle automatique intégré (BCAS) permet de surveiller les principaux paramètres techniques du GLS et d'identifier ses dysfonctionnements. Les GLS sont mis en service en fournissant une tension d'alimentation à tous les appareils ; à cet effet, la station dispose d'un tableau de distribution sur lequel se trouvent les commandes du système d'alimentation électrique.
 Selon la méthode de visualisation du plan d'eau, vue panoramique (CR) 360 vue sectorielle (SO) 25 0 vue en escalier (SHO) 0 360 vue sectorielle en escalier (SSO) 0 120 A AA A 0 A A 120 0 120 A A 120 0 0
Selon la méthode de visualisation du plan d'eau, vue panoramique (CR) 360 vue sectorielle (SO) 25 0 vue en escalier (SHO) 0 360 vue sectorielle en escalier (SSO) 0 120 A AA A 0 A A 120 0 120 A A 120 0 0


 Riz. 4. Vue de l'indicateur avec un balayage en spirale Fig. 9. Vue des marques cibles sur un indicateur de balayage linéaire Fig. 5. Vue de l'indicateur avec balayage horizontal Fig. 10. Vue de l'indicateur avec échelles de relèvement et de distance
Riz. 4. Vue de l'indicateur avec un balayage en spirale Fig. 9. Vue des marques cibles sur un indicateur de balayage linéaire Fig. 5. Vue de l'indicateur avec balayage horizontal Fig. 10. Vue de l'indicateur avec échelles de relèvement et de distance



 où r est la distance entre l'antenne sonar et la cible ; Wa – puissance de rayonnement acoustique, W ; ki = kizl – coefficient de concentration axiale de l'antenne en mode rayonnement. Re = Rсф - rayon équivalent de la cible ou rayon de la sphère équivalente β - coefficient d'atténuation spatiale, d.B/km. En termes de pression Pac à une distance de 1 mètre de l'antenne, l'expression peut s'écrire : (1)
où r est la distance entre l'antenne sonar et la cible ; Wa – puissance de rayonnement acoustique, W ; ki = kizl – coefficient de concentration axiale de l'antenne en mode rayonnement. Re = Rсф - rayon équivalent de la cible ou rayon de la sphère équivalente β - coefficient d'atténuation spatiale, d.B/km. En termes de pression Pac à une distance de 1 mètre de l'antenne, l'expression peut s'écrire : (1)
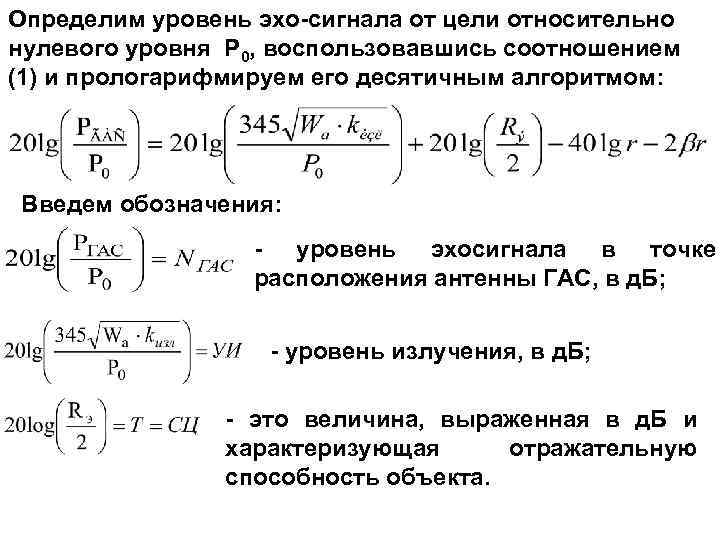 Déterminons le niveau du signal d'écho de la cible par rapport au niveau zéro P 0, en utilisant la relation (1) et prenons le logarithme de celui-ci avec un algorithme décimal : Introduisons la notation : - le niveau du signal d'écho à l'emplacement de l'antenne sonar, en d.B ; - niveau de rayonnement, en d.B ; - c'est une grandeur exprimée en d.B et caractérisant la réflectivité d'un objet.
Déterminons le niveau du signal d'écho de la cible par rapport au niveau zéro P 0, en utilisant la relation (1) et prenons le logarithme de celui-ci avec un algorithme décimal : Introduisons la notation : - le niveau du signal d'écho à l'emplacement de l'antenne sonar, en d.B ; - niveau de rayonnement, en d.B ; - c'est une grandeur exprimée en d.B et caractérisant la réflectivité d'un objet.
 PR – pertes de propagation standard, en dB, prenant en compte l'atténuation du signal lors de sa propagation depuis l'antenne sonar jusqu'à la cible et retour, en tenant compte de la loi sphérique de propagation. Compte tenu des notations introduites, l'expression prendra la forme : NGAS = UI + SC – 2 PR (2) La formule (2) sert à estimer le niveau du signal d'écho de la cible au point de réception dans un environnement homogène sans limites sans tenir compte des interférences.
PR – pertes de propagation standard, en dB, prenant en compte l'atténuation du signal lors de sa propagation depuis l'antenne sonar jusqu'à la cible et retour, en tenant compte de la loi sphérique de propagation. Compte tenu des notations introduites, l'expression prendra la forme : NGAS = UI + SC – 2 PR (2) La formule (2) sert à estimer le niveau du signal d'écho de la cible au point de réception dans un environnement homogène sans limites sans tenir compte des interférences.
 Compte tenu du traitement du signal utile Pgas = Pc et de l'interférence Pp dans le GAS, et compte tenu du coefficient de reconnaissance δ, on peut écrire l'expression suivante Pgas = Pc = δ Pp Equation de la gamme d'énergie du GL (EP ) mode : = où k est le coefficient de concentration axiale de l'antenne ; Δf – bande de fréquences (plage) du trajet de réception du sonar, Hz ; f 0 – fréquence moyenne de la gamme, kHz ; β = 0,036f03/2[k. Hz] – coefficient d'atténuation spatiale, d.B/km.
Compte tenu du traitement du signal utile Pgas = Pc et de l'interférence Pp dans le GAS, et compte tenu du coefficient de reconnaissance δ, on peut écrire l'expression suivante Pgas = Pc = δ Pp Equation de la gamme d'énergie du GL (EP ) mode : = où k est le coefficient de concentration axiale de l'antenne ; Δf – bande de fréquences (plage) du trajet de réception du sonar, Hz ; f 0 – fréquence moyenne de la gamme, kHz ; β = 0,036f03/2[k. Hz] – coefficient d'atténuation spatiale, d.B/km.
 GAS PO PN Antenne GAS UI PR SC UP Cible PR D L'équation de portée du mode GL (EP) sous forme symbolique peut s'écrire (en tenant compte du signe « - ») sous la forme : EP = -(UI + SC – UP - PO + PN) = 2 PR EP = UE (niveau d'interférence) =
GAS PO PN Antenne GAS UI PR SC UP Cible PR D L'équation de portée du mode GL (EP) sous forme symbolique peut s'écrire (en tenant compte du signe « - ») sous la forme : EP = -(UI + SC – UP - PO + PN) = 2 PR EP = UE (niveau d'interférence) =
 DP (seuil de détection) = PN (indicateur de direction) = Les sonars actifs comprennent : - le sonar de mesure de distance - le sonar de communication - le sonar d'identification - le sonar de détection de mines - le sonar de détection de torpilles - le sonar de détection de nageurs sous-marins et le sonar anti-sabotage - le sonar d'éclairage des glaces conditions climatiques et détection des traces d'eau - Enregistrements hydroacoustiques - Sonar à vue latérale
DP (seuil de détection) = PN (indicateur de direction) = Les sonars actifs comprennent : - le sonar de mesure de distance - le sonar de communication - le sonar d'identification - le sonar de détection de mines - le sonar de détection de torpilles - le sonar de détection de nageurs sous-marins et le sonar anti-sabotage - le sonar d'éclairage des glaces conditions climatiques et détection des traces d'eau - Enregistrements hydroacoustiques - Sonar à vue latérale

 L'armement hydroacoustique du NK se compose de : ØGAK MGK-335 « Platinum » - un complexe hydroacoustique pour la détection, la désignation de cibles et les communications ; ØGAK MGK-345 «Bronze» - complexe de détection hydroacoustique, de désignation de cible et de communication ; ØGAK MGK-355 "Polynom" - complexe hydroacoustique pour la détection de sous-marins et la désignation de cibles pour les armes anti-sous-marines ; ØGAS MG-332 "Argun", GAS MG-332 T "Argun-T" - station de détection hydroacoustique et de désignation de cibles pour navires anti-sous-marins ; ØGAS MG-329 "Oka", GAS MG-329 M "Oka-M" - station hydroacoustique abaissée ; ØGAS MG-339 « Shelon » ou GAS MG-339 T « Shelon-T » - Station hydroacoustique pour la détection, la détermination de coordonnées, la communication et l'identification ;
L'armement hydroacoustique du NK se compose de : ØGAK MGK-335 « Platinum » - un complexe hydroacoustique pour la détection, la désignation de cibles et les communications ; ØGAK MGK-345 «Bronze» - complexe de détection hydroacoustique, de désignation de cible et de communication ; ØGAK MGK-355 "Polynom" - complexe hydroacoustique pour la détection de sous-marins et la désignation de cibles pour les armes anti-sous-marines ; ØGAS MG-332 "Argun", GAS MG-332 T "Argun-T" - station de détection hydroacoustique et de désignation de cibles pour navires anti-sous-marins ; ØGAS MG-329 "Oka", GAS MG-329 M "Oka-M" - station hydroacoustique abaissée ; ØGAS MG-339 « Shelon » ou GAS MG-339 T « Shelon-T » - Station hydroacoustique pour la détection, la détermination de coordonnées, la communication et l'identification ;
 ØGAS MG-79 ou GAS MG-89 « Serna » - station hydroacoustique pour la détection des mines d'ancrage et de fond ; ØGAS MG-7 « Braslet » et GAS MG-737 « Amulet-3 » - station hydroacoustique pour détecter les forces et moyens de sabotage sous-marins ; ØGAS MG-26 « Khosta » ou GAS MG-45 « Backgammon » - équipement de communication et d'identification hydroacoustique. ØGAS KMG-12 « Kassandra » - équipement de classification de cibles pour les stations hydroacoustiques des navires de surface lorsqu'ils fonctionnent en mode actif. ØGAS MG-409 S – système de détection passif pour bouées sonores. ØGAS "Altyn" - équipement de mesure de la répartition verticale de la vitesse du son dans l'eau depuis un navire de surface ; ØGAS MI-110 KM – équipement de détection du sillage du sous-marin.
ØGAS MG-79 ou GAS MG-89 « Serna » - station hydroacoustique pour la détection des mines d'ancrage et de fond ; ØGAS MG-7 « Braslet » et GAS MG-737 « Amulet-3 » - station hydroacoustique pour détecter les forces et moyens de sabotage sous-marins ; ØGAS MG-26 « Khosta » ou GAS MG-45 « Backgammon » - équipement de communication et d'identification hydroacoustique. ØGAS KMG-12 « Kassandra » - équipement de classification de cibles pour les stations hydroacoustiques des navires de surface lorsqu'ils fonctionnent en mode actif. ØGAS MG-409 S – système de détection passif pour bouées sonores. ØGAS "Altyn" - équipement de mesure de la répartition verticale de la vitesse du son dans l'eau depuis un navire de surface ; ØGAS MI-110 KM – équipement de détection du sillage du sous-marin.
 Riz. 1. Le croiseur lance-missiles Projet 1164 Le Projet 1164 est équipé d'armes hydroacoustiques : q MGK-335 « Platina » SJSC ; q GAZ MG-7 « Braslet » - 2 jeux ; q GAZ MG-737 « Amulette-3 » ; q GAZ KMG-12 « Cassandra ». on trouve ce qui suit
Riz. 1. Le croiseur lance-missiles Projet 1164 Le Projet 1164 est équipé d'armes hydroacoustiques : q MGK-335 « Platina » SJSC ; q GAZ MG-7 « Braslet » - 2 jeux ; q GAZ MG-737 « Amulette-3 » ; q GAZ KMG-12 « Cassandra ». on trouve ce qui suit
 Riz. 2. Grand navire anti-sous-marin du Projet 1155 (1155. 1) Le Projet 1155 est armé des armes hydroacoustiques suivantes : SJSC MGK-335 « Platina » ; GAZ MG-7 « Braslet » - 2 jeux ; GAZ "Altyn"; GAZ MI-110 KM. Le projet 1155.1 est armé des armes hydroacoustiques suivantes : SAC MGK-355 « Polynom » ; GAZ MG-7 « Braslet » - 2 jeux ; GAZ "Altyn"; GAZ MI-110 KM.
Riz. 2. Grand navire anti-sous-marin du Projet 1155 (1155. 1) Le Projet 1155 est armé des armes hydroacoustiques suivantes : SJSC MGK-335 « Platina » ; GAZ MG-7 « Braslet » - 2 jeux ; GAZ "Altyn"; GAZ MI-110 KM. Le projet 1155.1 est armé des armes hydroacoustiques suivantes : SAC MGK-355 « Polynom » ; GAZ MG-7 « Braslet » - 2 jeux ; GAZ "Altyn"; GAZ MI-110 KM.
 Riz. 3. Navire Projet 956. Classe : navire lance-missiles et d'artillerie, sous-classe : destroyer. Le Projet 956 de 1er rang est armé des armes hydroacoustiques suivantes : SAC MGK-355 « Polynom » ; GAZ MG-7 « Braslet » - 2 jeux ; GAZ KMG-12 "Cassandra".
Riz. 3. Navire Projet 956. Classe : navire lance-missiles et d'artillerie, sous-classe : destroyer. Le Projet 956 de 1er rang est armé des armes hydroacoustiques suivantes : SAC MGK-355 « Polynom » ; GAZ MG-7 « Braslet » - 2 jeux ; GAZ KMG-12 "Cassandra".
 Riz. 4. Le bateau lance-missiles du projet 1241.2 Le projet 1241.2 est armé des armes hydroacoustiques suivantes : SJSC MGK-345 « Bronza » ; GAZ MG-45 "Backgammon" ;
Riz. 4. Le bateau lance-missiles du projet 1241.2 Le projet 1241.2 est armé des armes hydroacoustiques suivantes : SJSC MGK-345 « Bronza » ; GAZ MG-45 "Backgammon" ;
 Riz. 5. Le torpilleur du Projet 1241 Le Projet 1241 est armé des armes hydroacoustiques suivantes : SJSC MGK-345 « Bronze » ; GAZ MG-45 "Backgammon" ;
Riz. 5. Le torpilleur du Projet 1241 Le Projet 1241 est armé des armes hydroacoustiques suivantes : SJSC MGK-345 « Bronze » ; GAZ MG-45 "Backgammon" ;
 Riz. 6. Petit navire anti-sous-marin du Projet 1124 Le Projet 1124 est armé des armes hydroacoustiques suivantes : GAS MG-339 « Shelon » ou GAS MG-339 T « Shelon-T » ; Certains projets sont armés du MGK-335 "Platina" SJSC ; GAZ MG-322 "Argun" ou GAZ MG-322 T "Argun-T" ; GAZ MG-329 "Oka" ou GAZ MG-329 M "Oka-M" ; GAS MG-26 "Khosta" ou GAS MG-45 "Backgammon" ; GAZ KMG-12 "Cassandra". GAZ MG-409 S.
Riz. 6. Petit navire anti-sous-marin du Projet 1124 Le Projet 1124 est armé des armes hydroacoustiques suivantes : GAS MG-339 « Shelon » ou GAS MG-339 T « Shelon-T » ; Certains projets sont armés du MGK-335 "Platina" SJSC ; GAZ MG-322 "Argun" ou GAZ MG-322 T "Argun-T" ; GAZ MG-329 "Oka" ou GAZ MG-329 M "Oka-M" ; GAS MG-26 "Khosta" ou GAS MG-45 "Backgammon" ; GAZ KMG-12 "Cassandra". GAZ MG-409 S.
 Riz. 7. Le dragueur de mines de base BTShch du projet 1265 (projets 260, 270) Le projet 1265 est armé des armes hydroacoustiques suivantes : GAS MG-79 ou GAS MG-89 « Serna » ; GAZ "Kabarga";
Riz. 7. Le dragueur de mines de base BTShch du projet 1265 (projets 260, 270) Le projet 1265 est armé des armes hydroacoustiques suivantes : GAS MG-79 ou GAS MG-89 « Serna » ; GAZ "Kabarga";
 Riz. 8. Grand navire de débarquement BDK Projet 775 Le Projet 775 est armé des armes hydroacoustiques suivantes : GAS MG-7 « Braslet » ; GAZ MG-26 "Khosta" ou GAZ MG-45 "Backgammon".
Riz. 8. Grand navire de débarquement BDK Projet 775 Le Projet 775 est armé des armes hydroacoustiques suivantes : GAS MG-7 « Braslet » ; GAZ MG-26 "Khosta" ou GAZ MG-45 "Backgammon".
 Stations hydroacoustiques "Tamir-11" (1953) GAZ pour navires de surface de petit déplacement Nombre total d'appareils - 17 Poids des appareils - 1000 kg Concepteur en chef VOVNOBOY B.N.
Stations hydroacoustiques "Tamir-11" (1953) GAZ pour navires de surface de petit déplacement Nombre total d'appareils - 17 Poids des appareils - 1000 kg Concepteur en chef VOVNOBOY B.N.
 Stations hydroacoustiques "Hercules" (1957) GAZ pour navires de surface de déplacement moyen et grand Nombre total d'appareils - 30 Poids des appareils - 5800 kg Concepteur en chef UMIKOV Z.N.
Stations hydroacoustiques "Hercules" (1957) GAZ pour navires de surface de déplacement moyen et grand Nombre total d'appareils - 30 Poids des appareils - 5800 kg Concepteur en chef UMIKOV Z.N.
 Stations hydroacoustiques "Mezen-2" (1963) GAZ pour détecter les mines de fond Nombre total d'appareils Poids des appareils - 12 - 2100 kg Concepteur en chef NIZENKO I. I.
Stations hydroacoustiques "Mezen-2" (1963) GAZ pour détecter les mines de fond Nombre total d'appareils Poids des appareils - 12 - 2100 kg Concepteur en chef NIZENKO I. I.
 Stations hydroacoustiques "Cachalot" (1963) GAZ pour la recherche de navires coulés Nombre total d'appareils - 22 Poids des appareils - 4000 kg (sans pièces de rechange) Concepteur en chef TIMOKHOV N. A.
Stations hydroacoustiques "Cachalot" (1963) GAZ pour la recherche de navires coulés Nombre total d'appareils - 22 Poids des appareils - 4000 kg (sans pièces de rechange) Concepteur en chef TIMOKHOV N. A.
 Complexes hydroacoustiques "Rubin" (1964) SAC pour sous-marins nucléaires polyvalents Concepteur en chef ALADISHKIN E. I. Nombre total d'appareils - 56 Poids des appareils - 54747 kg
Complexes hydroacoustiques "Rubin" (1964) SAC pour sous-marins nucléaires polyvalents Concepteur en chef ALADISHKIN E. I. Nombre total d'appareils - 56 Poids des appareils - 54747 kg
 Stations hydroacoustiques "Titan-2" (1966) GAS pour grands navires anti-sous-marins Nombre total d'appareils Poids des appareils - 37 - 16000 kg Concepteur en chef KHARAT G. M.
Stations hydroacoustiques "Titan-2" (1966) GAS pour grands navires anti-sous-marins Nombre total d'appareils Poids des appareils - 37 - 16000 kg Concepteur en chef KHARAT G. M.
 Stations hydroacoustiques "Argun" (1967) GAZ pour petits navires anti-sous-marins Nombre total d'appareils Poids des appareils - 30 - 7600 kg avec pièces de rechange Concepteur en chef IVANCHENKO V. P.
Stations hydroacoustiques "Argun" (1967) GAZ pour petits navires anti-sous-marins Nombre total d'appareils Poids des appareils - 30 - 7600 kg avec pièces de rechange Concepteur en chef IVANCHENKO V. P.
 Stations hydroacoustiques "Serna" (1969) GAZ pour la détection des mines d'ancrage et de fond Nombre total d'appareils Poids des appareils - 20 - 3900 kg Concepteur en chef LYASHENKO G. G.
Stations hydroacoustiques "Serna" (1969) GAZ pour la détection des mines d'ancrage et de fond Nombre total d'appareils Poids des appareils - 20 - 3900 kg Concepteur en chef LYASHENKO G. G.
 Stations hydroacoustiques "BUK" (1971) GAZ pour navires de recherche Nombre total d'instruments Poids des instruments - 30 - 11 000 kg Concepteur en chef KLIMENKO Zh.P.
Stations hydroacoustiques "BUK" (1971) GAZ pour navires de recherche Nombre total d'instruments Poids des instruments - 30 - 11 000 kg Concepteur en chef KLIMENKO Zh.P.
 Complexes hydroacoustiques "Platina" (1972) SAC pour navires de surface de moyen et grand déplacement Concepteur en chef KLIMOVITSKY L. D. Nombre d'appareils - 64 Poids des appareils - 23 tonnes
Complexes hydroacoustiques "Platina" (1972) SAC pour navires de surface de moyen et grand déplacement Concepteur en chef KLIMOVITSKY L. D. Nombre d'appareils - 64 Poids des appareils - 23 tonnes
 Complexes hydroacoustiques "Polynom" (1979) HAK pour navires de navigation à grand déplacement Concepteur en chef V. G. SOLOVIEV Nombre total d'appareils - 152 Poids des appareils - 72 000
Complexes hydroacoustiques "Polynom" (1979) HAK pour navires de navigation à grand déplacement Concepteur en chef V. G. SOLOVIEV Nombre total d'appareils - 152 Poids des appareils - 72 000
 Complexes hydroacoustiques "Zvezda-M 1" (1986) Système sonar numérique pour NK à déplacement moyen Concepteur en chef Aleshchenko O. M. Nombre total d'appareils - 64 Poids des appareils - 23 000 kg
Complexes hydroacoustiques "Zvezda-M 1" (1986) Système sonar numérique pour NK à déplacement moyen Concepteur en chef Aleshchenko O. M. Nombre total d'appareils - 64 Poids des appareils - 23 000 kg
 Complexes hydroacoustiques "Kabarga" (1987) Sonar de détection de mines pour dragueurs de mines en mer, de base et offshore Nombre total d'appareils - 42 Poids des appareils - 8500 kg Concepteur en chef LYASHENKO G. G.
Complexes hydroacoustiques "Kabarga" (1987) Sonar de détection de mines pour dragueurs de mines en mer, de base et offshore Nombre total d'appareils - 42 Poids des appareils - 8500 kg Concepteur en chef LYASHENKO G. G.
 Complexes hydroacoustiques "Zvezda M 1 -01" (1988) Système sonar numérique pour navires de surface à petit déplacement Concepteur en chef Aleshchenko O. M. Nombre total d'appareils - 60 Poids des appareils - 16 500 kg
Complexes hydroacoustiques "Zvezda M 1 -01" (1988) Système sonar numérique pour navires de surface à petit déplacement Concepteur en chef Aleshchenko O. M. Nombre total d'appareils - 60 Poids des appareils - 16 500 kg
 Complexes hydroacoustiques "Zvezda-2" (1993) Système sonar numérique pour véhicules de navigation à grande cylindrée Concepteur en chef Borisenko N. N. Nombre total d'appareils - 127 Poids des appareils - 77742 kg
Complexes hydroacoustiques "Zvezda-2" (1993) Système sonar numérique pour véhicules de navigation à grande cylindrée Concepteur en chef Borisenko N. N. Nombre total d'appareils - 127 Poids des appareils - 77742 kg

 Complexes Corvette prometteurs du projet 12441, pour lesquels l'installation du Zarya-2 SJSC est prévue
Complexes Corvette prometteurs du projet 12441, pour lesquels l'installation du Zarya-2 SJSC est prévue
L'hydroacoustique sous-marine russe au tournant du 21e siècle
L'hydroacoustique militaire est une science d'élite dont seul un État fort peut se permettre le développement
Allemand ALEXANDROV
Possédant le plus haut potentiel scientifique et technique (l'entreprise emploie 13 docteurs et plus de 60 candidats scientifiques), l'entreprise développe les domaines prioritaires suivants de l'hydroacoustique domestique :
Complexes et systèmes hydroacoustiques (GAS) passifs et actifs multifonctionnels pour l'éclairage de l'environnement sous-marin dans l'océan, notamment pour sous-marins, navires de surface, aéronefs, systèmes de détection de nageurs sous-marins ;
Systèmes avec antennes remorquées étendues et flexibles pour fonctionner dans une large gamme de fréquences pour les navires de surface et les sous-marins, ainsi que pour les navires stationnaires ;
Systèmes hydroacoustiques stationnaires actifs, passifs et actifs-passifs pour protéger la zone du plateau continental contre la pénétration non autorisée de navires de surface et de sous-marins ;
Systèmes de navigation et de recherche et d'enquête hydroacoustiques" ;
Transducteurs hydroacoustiques, antennes, réseaux d'antennes phasées de forme complexe, comportant jusqu'à plusieurs milliers de canaux de réception ;
Écrans acoustiques et carénages insonorisants ;
Systèmes de transmission d'informations par canal hydroacoustique ;
systèmes adaptatifs pour le traitement des informations hydroacoustiques dans des environnements hydrologiques et acoustiques complexes et d'interférence de signaux ;
Classificateurs de cibles par leurs signatures et la structure fine du champ sonore ;
Sonomètres pour navires de surface et sous-marins.
L'entreprise comprend aujourd'hui dix entreprises situées à Saint-Pétersbourg et dans la région de Léningrad, à Taganrog, Volgograd, Severodvinsk et en République de Carélie, y compris des instituts de recherche, des usines de production en série d'équipements hydroacoustiques, des entreprises spécialisées dans l'entretien des équipements dans les installations, et des terrains d'essais. Il s'agit de cinq mille spécialistes hautement qualifiés - ingénieurs, ouvriers, scientifiques, dont plus de 25 % sont des jeunes.
L'équipe de l'entreprise a développé presque tous les GAK pl produits en série (Rubin, Ocean, Rubicon, Skat, Skat-BDRM, Skat-3), un certain nombre de complexes et systèmes hydroacoustiques pour navires de surface (Platina", "Polynomial", station pour détection des nageurs sous-marins "Pallada"), systèmes stationnaires "Liman", "Volkhov", "Agam", "Dniester".
Les systèmes hydroacoustiques pour sous-marins créés par l'entreprise sont des moyens techniques uniques dont la création nécessite les plus hautes connaissances et une vaste expérience en hydroacoustique. Comme on peut le dire, la tâche de détection d'un sous-marin avec un radiogoniomètre est similaire en complexité à la tâche de détection d'une flamme de bougie à une distance de plusieurs kilomètres par une journée ensoleillée, et pourtant pour un sous-marin situé sous l'eau, le GAC est pratiquement la seule source d'information sur l'environnement. Les principales tâches résolues par le complexe hydroacoustique d'un sous-marin sont la détection de sous-marins, de navires de surface, de torpilles en mode radiogoniométrie sonore, le suivi automatique des cibles, la détermination de leurs coordonnées, la classification des cibles, la détection et la radiogoniométrie des cibles en mode sonar, interception de signaux hydroacoustiques dans une large gamme de fréquences, fourniture de communications sonores sous-marines sur de longues distances, offrant une visibilité des conditions à proximité et la sécurité de la navigation, éclairant les conditions des glaces lors de la navigation sous la glace, assurant la protection d'un navire contre les mines et les torpilles, résolvant les problèmes de navigation - mesure vitesse, profondeur, etc. En plus de ces tâches, le complexe doit disposer d'un puissant système de contrôle automatisé, d'un système de surveillance de son propre bruit, et doit effectuer en permanence des calculs hydrologiques complexes pour assurer le fonctionnement de tous les systèmes et prédire la situation dans la zone de sous-marin. opération. Le complexe dispose de simulateurs pour tous les systèmes du complexe hydroacoustique, assurant la formation et la formation du personnel.
La base de tout complexe hydroacoustique est constituée d'antennes, réseaux discrets phasés de forme complexe, constitués de transducteurs piézocéramiques, qui doivent assurer la réception des signaux du milieu aquatique sur un bateau soumis à d'énormes charges dues à la pression hydrostatique. La tâche du SAC est de détecter ces signaux dans le contexte de son propre bruit, du bruit d'écoulement lorsque le bateau est en mouvement, du bruit de la mer, des cibles interférentes et de nombreux autres facteurs qui masquent le signal utile.
Un GAK moderne est un complexe numérique complexe qui traite d'énormes flux d'informations en temps réel (chaque antenne du complexe est constituée de milliers, voire de dizaines de milliers d'éléments individuels, dont chacun doit être traité de manière synchrone avec tous les autres). Son fonctionnement n'est possible qu'avec l'utilisation des derniers systèmes multiprocesseurs, qui assurent la tâche d'observation simultanée, dans l'espace et multibande, en fréquence, des champs acoustiques environnants.
L'élément le plus important et le plus important du complexe sont les dispositifs d'affichage des informations reçues. Lors de la création de ces appareils, non seulement les problèmes scientifiques et techniques, mais aussi ergonomiques et psychologiques sont résolus - il ne suffit pas de recevoir un signal de l'environnement extérieur, il faut que les opérateurs du complexe (et c'est un nombre minimum de personnes) ont à chaque instant une compréhension complète de la situation environnante, du contrôle et de la sécurité du navire, ainsi que du mouvement de multiples cibles, de surface, sous-marines et aériennes, qui constituent une menace ou un intérêt potentiel pour le sous-marin. Et les développeurs sont constamment en équilibre au bord d'un problème - d'une part, pour afficher la quantité maximale d'informations traitées par le complexe et nécessaires à l'opérateur, d'autre part, pour ne pas violer la « règle de Miller », qui limite la quantité d'informations qui peuvent être absorbées simultanément par une personne.
Une caractéristique importante des systèmes hydroacoustiques, en particulier des antennes, réside dans les exigences relatives à leur résistance, leur durabilité et leur capacité à fonctionner sans réparation ni remplacement pendant très longtemps - dans des conditions de service de combat, il est généralement impossible de réparer une antenne hydroacoustique.
Un SAC moderne ne peut pas être considéré comme un système fermé et autonome, mais uniquement comme un élément d'un système intégré de surveillance sous-marine, recevant et utilisant des informations a priori continuellement mises à jour sur les cibles provenant de systèmes de détection non acoustiques, de reconnaissance, etc., et fournir des informations sur l'évolution de la situation sous-marine au système, qui analyse les situations tactiques et formule des recommandations sur l'utilisation de différents modes du système d'attaque dans une situation donnée.
Le développement de systèmes hydroacoustiques pour un sous-marin est une compétition continue avec les développeurs d'un ennemi potentiel, d'une part, puisque la tâche la plus importante du SAC est d'assurer au moins la parité en situation de duel (l'ennemi vous entend et vous reconnaît , et vous êtes à la même distance), et il faut de toutes nos forces et moyens augmenter la portée du SAC, principalement dans le mode de radiogoniométrie à bruit passif, qui permet de détecter des cibles sans démasquer sa propre localisation, et avec les constructeurs navals, les concepteurs de sous-marins, par contre, puisque le bruit des sous-marins diminue à chaque nouvelle génération, à chaque nouveau projet, même à chaque nouveau navire construit, et il faut détecter un signal dont le niveau est d'un ordre de grandeur inférieur que le bruit ambiant de la mer. Et il est évident que la création d'un système sonar moderne pour les sous-marins du 21e siècle est le travail conjoint des développeurs du complexe et des développeurs du bateau, qui conçoivent et placent conjointement les éléments du système sonar sur le navire de manière à ce que son fonctionnement dans ces conditions est le plus efficace.
L'expérience de conception du GAK pl disponible dans notre institut nous permet d'identifier les principaux domaines problématiques dont nous pouvons espérer une augmentation significative de l'efficacité dans un avenir proche.
1. HAK avec antenne conforme et à couverture conforme
La réduction du bruit du sous-marin, associée aux efforts des concepteurs pour optimiser les solutions techniques pour la conception de sa coque et de ses mécanismes, a conduit à une diminution notable de la portée du sonar sur les sous-marins modernes. L'augmentation de l'ouverture des antennes traditionnelles (sphériques ou cylindriques) est limitée par la géométrie de l'extrémité avant du corps. La solution évidente dans cette situation était la création d'une antenne conforme (combinée aux contours du carré), dont la superficie totale, et donc le potentiel énergétique, dépasse largement les indicateurs similaires des antennes traditionnelles. La première expérience de création de telles antennes s’est avérée plutôt fructueuse.
Une direction encore plus prometteuse semble être la création d’antennes de couverture conformes situées le long du côté de la place. La longueur de ces antennes peut atteindre des dizaines de mètres et la superficie peut dépasser une centaine de mètres carrés. La création de tels systèmes est associée à la nécessité de résoudre un certain nombre de problèmes techniques.
L'antenne à couverture conforme est située dans la zone d'influence prédominante des ondes inhomogènes causées par des interférences structurelles, ainsi que des interférences d'origine hydrodynamique, y compris celles résultant de l'excitation du boîtier par le flux venant en sens inverse. Les écrans acoustiques, traditionnellement utilisés pour réduire l'influence des interférences sur l'antenne, ne sont pas assez efficaces dans le domaine des basses fréquences des antennes embarquées. Les moyens possibles d'assurer un fonctionnement efficace des antennes embarquées, à en juger par l'expérience étrangère, sont, d'une part, le placement structurel des machines et mécanismes les plus bruyants des sous-marins de manière à ce que leur influence sur les systèmes embarqués soit minime, et deuxièmement, l'utilisation de méthodes algorithmiques pour réduire l'influence des interférences structurelles sur le trajet GAK (méthodes adaptatives de compensation des interférences structurelles, y compris l'utilisation de capteurs de vibrations situés à proximité immédiate de l'antenne). L'utilisation de méthodes de traitement de l'information dites « à phase vectorielle », qui permettent d'augmenter l'efficacité du complexe grâce à un traitement conjoint des champs de pression et de vitesse de vibration, semble très prometteuse. Un autre moyen de réduire l'influence des interférences hydrodynamiques, qui affectent l'efficacité des antennes à couverture conforme, est l'utilisation de convertisseurs de film (plaques PVDF), qui, en raison de la moyenne sur une surface de 1,0 x 0,5 m, peuvent considérablement (à en juger par les données de la littérature - jusqu'à 20 dB) réduisent l'influence des interférences hydrodynamiques sur le tractus HAK.
2. Algorithmes adaptatifs de traitement des informations hydroacoustiques, cohérents avec l'environnement de propagation
« Adaptation » est traditionnellement comprise comme la capacité d'un système à modifier ses paramètres en fonction de conditions environnementales changeantes afin de maintenir son efficacité. En relation avec les algorithmes de traitement, le terme « adaptation » désigne la coordination (dans l'espace et dans le temps) du chemin de traitement avec les caractéristiques des signaux et du bruit. Les algorithmes adaptatifs sont largement utilisés dans les systèmes modernes et leur efficacité est principalement déterminée par les ressources matérielles du complexe. Plus modernes sont les algorithmes qui prennent en compte la variabilité spatio-temporelle du canal de propagation du signal. L'utilisation de tels algorithmes permet de résoudre simultanément les problèmes de détection, de désignation et de classification des cibles, en utilisant des informations a priori sur le canal de propagation du signal. La source de ces informations peut être des modèles océanologiques dynamiques adaptatifs qui prédisent avec une fiabilité suffisante la répartition de la température, de la densité, de la salinité et de certains autres paramètres environnementaux dans la zone d'exploitation du pl. De tels modèles existent et sont largement utilisés à l’étranger. L'utilisation d'estimations assez fiables des paramètres du canal de propagation permet, à en juger par les estimations théoriques, d'augmenter considérablement la précision de la détermination des coordonnées cibles.
3. Systèmes acoustiques situés sur des véhicules sous-marins sans pilote contrôlés, résolvant les problèmes de détection polystatique en mode actif, ainsi que le problème de recherche d'objets à fond limoneux
Le sous-marin lui-même est une structure énorme, longue de plus de cent mètres, et toutes les tâches à résoudre pour assurer sa propre sécurité ne peuvent pas être résolues en plaçant des systèmes hydroacoustiques sur le navire lui-même. L'une de ces tâches est la détection des objets de fond et envasés qui présentent un danger pour le navire. Pour examiner un objet, vous devez vous en rapprocher le plus possible sans constituer une menace pour votre propre sécurité. L'un des moyens possibles de résoudre ce problème est de créer un véhicule sous-marin sans pilote contrôlé situé sur un sous-marin, capable de manière indépendante ou par contrôle via une communication filaire ou sous-marine de s'approcher d'un objet d'intérêt et de le classer, et, si nécessaire, de le détruire. . En fait, la tâche est similaire à la création d'un complexe hydroacoustique lui-même, mais miniature, avec un dispositif de propulsion alimenté par batterie, placé sur un petit engin automoteur capable de se désamarrer d'un sous-marin en immersion, puis de revenir à l'amarrage. , tout en fournissant une communication bidirectionnelle constante. Aux USA, de tels engins ont été créés et font partie de l'armement des sous-marins de dernière génération (type Virginia).
4. Développement et création de nouveaux matériaux pour transducteurs hydroacoustiques, caractérisés par un poids et un coût inférieurs
Les transducteurs piézocéramiques qui composent les antennes sous-marines sont des structures extrêmement complexes ; la piézocéramique elle-même est un matériau très fragile et nécessite des efforts considérables pour la rendre solide tout en conservant son efficacité. Et depuis un certain temps déjà, on recherche un matériau qui aurait les mêmes propriétés de conversion de l'énergie vibratoire en électricité, mais qui serait un polymère, durable, léger et technologiquement avancé.
Les efforts technologiques à l'étranger ont conduit à la création de films polymères PVDF qui ont un effet piézoélectrique et sont pratiques pour la construction d'antennes de couverture (placées à bord d'un bateau). Le problème ici réside principalement dans la technologie permettant de créer des films épais garantissant une efficacité d’antenne suffisante. Encore plus prometteuse semble être l'idée de créer un matériau qui possède les propriétés des piézocéramiques, d'une part, et les propriétés d'un écran de protection qui étouffe (ou disperse) les signaux du sonar ennemis et réduit le bruit du navire. . Un tel matériau (caoutchouc piézo), appliqué sur la coque d'un sous-marin, fait en fait de l'ensemble de la coque du navire une antenne hydroacoustique, offrant ainsi une augmentation significative de l'efficacité des moyens hydroacoustiques. Une analyse des publications étrangères montre qu'aux États-Unis, de tels développements sont déjà entrés dans la phase de prototype, alors que dans notre pays, aucun progrès dans cette direction n'a été enregistré au cours des dernières décennies.
5. Classement des objectifs
La tâche de classification en hydroacoustique est un problème complexe lié à la nécessité de déterminer la classe d'une cible à partir des informations obtenues en mode radiogoniométrie bruit (dans une moindre mesure, à partir des données du mode actif). À première vue, le problème peut être facilement résolu - il suffit d'enregistrer le spectre d'un objet bruyant, de le comparer avec une base de données et d'obtenir une réponse - de quel type d'objet il s'agit, jusqu'au nom du commandant. En effet, le spectre de la cible dépend de la vitesse de la cible, de l'angle de la cible, le spectre observé par le système sonar contient des distorsions provoquées par le passage du signal à travers un canal de propagation aléatoirement inhomogène (milieu aquatique), et Cela dépend donc de la distance, des conditions météorologiques, de la zone d'exploitation et de bien d'autres raisons, ce qui rend le problème de la reconnaissance spectrale pratiquement insoluble. Par conséquent, dans la classification nationale, d'autres approches sont utilisées liées à l'analyse des caractéristiques inhérentes à une classe spécifique de cibles. Un autre problème qui nécessite des recherches scientifiques sérieuses, mais qui est urgent, est la classification des objets de fond et envasés associés à la reconnaissance des mines. Il est connu et confirmé expérimentalement que les dauphins reconnaissent en toute confiance les objets remplis d'air et d'eau en métal, en plastique et en bois. La tâche des chercheurs est de développer des méthodes et des algorithmes qui mettent en œuvre le même ordre d'actions qu'un dauphin effectue lors de la résolution d'un problème similaire.
6. La tâche de légitime défense
L'autodéfense est une tâche complexe visant à assurer la sécurité d'un navire (y compris la protection anti-torpilles), comprenant la détection, la classification, la désignation de cibles, la délivrance de données initiales pour l'utilisation d'armes et (ou) de contre-mesures techniques. La particularité de cette tâche réside dans l'utilisation intégrée des données de divers sous-systèmes du SAC, l'identification des données provenant de diverses sources et la garantie de l'interaction des informations avec d'autres systèmes du navire garantissant l'utilisation des armes.
Ce qui précède ne représente qu'une petite partie des domaines de recherche prometteurs qui doivent être poursuivis afin d'accroître l'efficacité des armes hydroacoustiques en cours de création. Mais d'une idée à un produit est un long voyage qui nécessite des technologies avancées, une base de recherche et d'expérimentation moderne, une infrastructure développée pour la production des matériaux nécessaires aux transducteurs et antennes hydroacoustiques, etc. Il convient de noter que ces dernières années ont été caractérisées pour notre entreprise par un sérieux rééquipement technique de la base de production et d'essais, rendu possible grâce au financement dans le cadre d'un certain nombre de programmes cibles fédéraux, tant civils que spéciaux, menée par le ministère de l'Industrie et du Commerce de la Fédération de Russie. Grâce à ce soutien financier, il a été possible au cours des cinq dernières années de rénover complètement et de moderniser de manière significative le plus grand bassin expérimental hydroacoustique d'Europe, situé sur le territoire de l'OJSC Concern Okeanpribor, et de mettre à jour radicalement les capacités de production des usines en série incluses dans le préoccupation, grâce à laquelle l'usine de Taganrog Priboy est devenue l'entreprise de fabrication d'instruments la plus avancée du sud de la Russie. Nous créons de nouvelles installations de production - piézomatériaux, circuits imprimés et, à l'avenir, la construction de nouvelles zones de production et scientifiques, des stands d'installation et de remise des équipements. Dans 2 à 3 ans, les capacités de production et scientifiques de l'entreprise, soutenues par une «banque de données» de nouvelles idées et développements, permettront de commencer la création d'armes hydroacoustiques de cinquième génération, si nécessaires à la Marine.